
效能陷阱:通用庫和輔助對象
 瀏覽:548
瀏覽:548
便利性和性能通常成反比。如果程式碼很容易使用,那麼它的最佳化程度就較低。如果優化的話就不太方便了。高效率的程式碼需要更接近實際運作的內容、運作方式的細節。
我在我們正在進行的為癌症研究運行和優化 DeepCell 細胞分割的工作中遇到了一個例子。 DeepCell AI 模型可以預測哪些像素最有可能位於細胞中。從那裡,我們從最可能的像素“洪水填充”,直到到達單元格邊界(低於某個閾值)。
這個過程的一部分涉及平滑預測細胞內的小間隙,這可能由於多種原因而發生,但在生物學上是不可能的。 (想想甜甜圈孔,而不是細胞的多孔膜。)
補洞演算法是這樣的:
- 識別物件(具有相同數字 id 的給定單元格標籤的連續像素)。
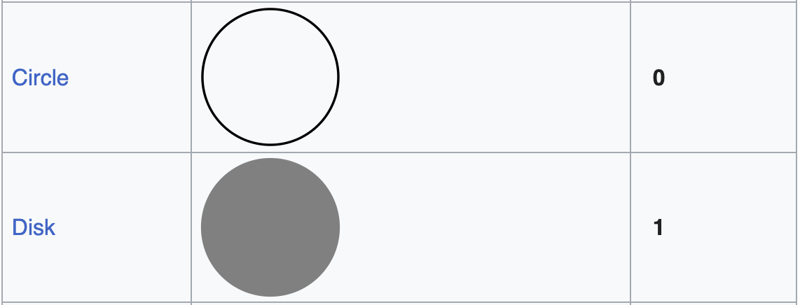
- 計算這些單元的“歐拉數”,即形狀表面的度量。
- 如果歐拉數小於 1(即表面有間隙),請平滑孔洞。
這是維基百科文章中歐拉數的範例;圓(僅直線部分)的歐拉特徵為零,而圓盤(「填充」圓)的值為 1。
不過,我們在這裡不是討論定義或計算歐拉數。我們將討論該庫計算歐拉數的簡單路徑為何效率很低。
首先要做的事情。我們透過使用 Speedscope 查看此設定檔注意到了這個問題:
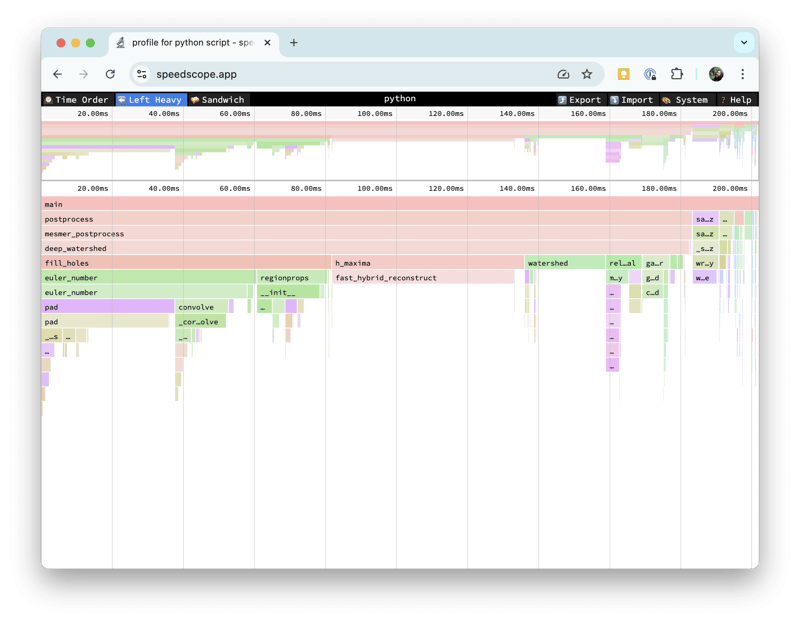
它顯示在 Regionprops 上花費了約 32 毫秒(約 15%)。這個視圖是左重的,如果我們進入時間軸視圖並放大,我們會得到這個:
(請注意,我們執行了兩次,因此此處約為 16 毫秒,其他地方約為 16 毫秒,未顯示。)
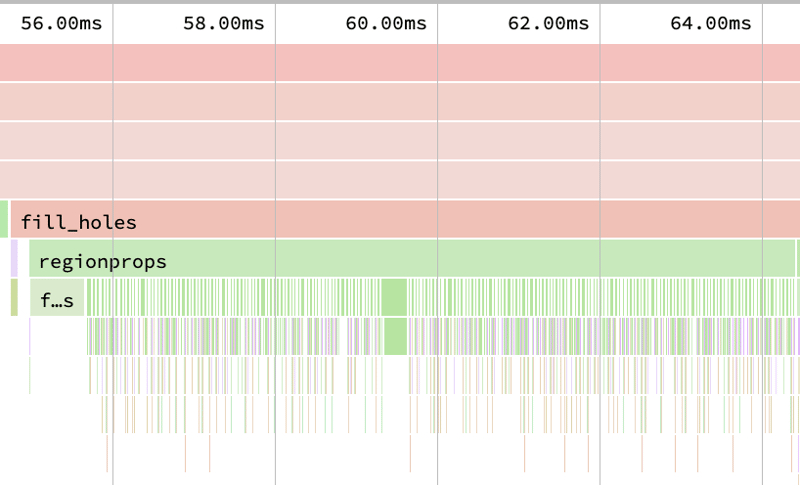
這立即令人懷疑:使用 find_objects 尋找物件的「有趣」部分是第一個條子,0.5 毫秒。它傳回一個元組列表,而不是生成器,所以當它完成時就完成了。那麼其他的東西又怎麼樣呢?我們正在建構 RegionProperties 物件。讓我們放大其中之一。

這些小條子(我們不會放大)是自訂 __setattr__ 呼叫:RegionProperties 物件支援別名,例如,如果您設定屬性 ConvexArea,它會重定向到標準屬性 area_convex。即使我們沒有使用它,我們仍然會使用屬性轉換器。
此外:我們甚至沒有使用區域屬性中計算的大部分屬性。我們只關心歐拉數:
props = regionprops(np.squeeze(label_img.astype('int')), cache=False)
for prop in props:
if prop.euler_number
反過來,它僅使用區域屬性的最基本方面:find_objects 檢測到的圖像區域(原始圖像的切片)。
因此,我們將程式碼更改為 fill_holes 程式碼,以簡單地繞過regionprops通用函數。相反,我們呼叫 find_objects 並將生成的圖像子區域傳遞給 euler_number 函數(而不是 RegionProperties 物件上的方法)。
這是拉取請求:deepcell-imaging#358 跳過 Regionprops 建置
透過跳過中間對象,我們的 fill_holes 操作得到了不錯的效能提升:
影像尺寸
前
後
加速
26萬像素
48ms
40ms
8 毫秒 (17%)
1.4億像素
15.6s
11.7秒
3.9秒(25%)
對於較大的圖像,4s 約佔整體運行時間的 3%——不是大部分,但也不算太差。
-
 Item 避免使用其他類型更合適的字串1。避免使用字串替代其他資料類型: 字串旨在表示文本,但經常被誤用來表示數字、枚舉或聚合結構。 如果資料本質上是數字,請使用 int、float 或 BigInteger 等類型,而不是 String。 String age = "30"; // incorreto int age = 30;...程式設計 發佈於2024-11-02
Item 避免使用其他類型更合適的字串1。避免使用字串替代其他資料類型: 字串旨在表示文本,但經常被誤用來表示數字、枚舉或聚合結構。 如果資料本質上是數字,請使用 int、float 或 BigInteger 等類型,而不是 String。 String age = "30"; // incorreto int age = 30;...程式設計 發佈於2024-11-02 -
如何使用sync.WaitGroup防止Go並發死鎖?解決 Goroutines 死鎖在這種情況下,您在 Go 並發代碼中遇到了死鎖錯誤。讓我們深入研究這個問題並提供一個有效的解決方案。 該錯誤是由於生產者和消費者的行為不匹配而發生的。在生產者函數中實現的生產者在有限的時間內在通道 ch 上發送值。然而,存在於主函數中的消費者無限期地運行,無休止地嘗試...程式設計 發佈於2024-11-02
-
如何處理文字檔案中的 Unicode 文字:無錯誤編寫的完整指南文本文件中的Unicode 文本:無錯誤寫作綜合指南從Google 文件中提取的編碼資料可能具有挑戰性,尤其是當遇到需要轉換為HTML 使用的非ASCII 符號時。本指南提供了處理 Unicode 文字並防止編碼錯誤的解決方案。 最初,在資料檢索期間將所有內容轉換為 Unicode 並將其寫入檔案似...程式設計 發佈於2024-11-02
-
EchoAPI 與 Insomnia:結合實例進行綜合比較作为一名全栈开发人员,我知道拥有一流的工具来调试、测试和记录 API 是多么重要。 EchoAPI 和 Insomnia 是两个出色的选项,每个选项都有自己独特的特性和功能。让我带您了解这些工具,比较它们的功能和优点,给您一些实际示例,并帮助您决定何时使用 EchoAPI 或 Insomnia。 ...程式設計 發佈於2024-11-02
-
出發時間和持續時間|程式設計教學介紹 本實驗旨在測試您對 Go 的時間和持續時間支援的理解。 時間 下面的程式碼包含如何在 Go 中使用時間和持續時間的範例。但是,程式碼的某些部分遺失了。您的任務是完成程式碼,使其按預期工作。 Go程式語言基礎知識。 熟悉 Go 的時間和持續時間支援。 $ ...程式設計 發佈於2024-11-02
-
了解 JavaScript 中的文件物件模型 (DOM)你好,神奇的 JavaScript 開發者? 瀏覽器提供了一個稱為文檔物件模型 (DOM) 的程式設計接口,它允許腳本(特別是 JavaScript)與網頁佈局進行互動。網頁的文檔物件模型 (DOM) 是一種分層樹狀結構,它將頁面的元件排列成對象,由瀏覽器在載入時建立。借助此範例,...程式設計 發佈於2024-11-02
-
開始使用 SPRING BATCH 進行編程Introduction Dans vos projets personnels ou professionnels, Il vous arrive de faire des traitements sur de gros volumes de données. Le traite...程式設計 發佈於2024-11-02
-
使用 CSS 讓您的 Github 個人資料脫穎而出以前,自訂 Github 個人資料的唯一方法是更新圖片或更改名稱。這意味著每個 Github 設定檔看起來都一樣,自訂它或脫穎而出的選項很少。 從那時起,您可以選擇使用 Markdown 建立自訂部分。您可以包括您的履歷、您的興趣和嗜好,讓您的個人資料反映您的身分。這是任何人在訪問您的個人資料時看...程式設計 發佈於2024-11-02
-
TypeScript 實用程式類型:增強程式碼可重複使用性TypeScript 提供內建實用程式類型,讓開發人員有效地轉換和重複使用類型,讓您的程式碼更加靈活和 DRY。在本文中,我們將探討關鍵實用程式類型,例如 Partial、Pick、Omit 和 Record,以協助您將 TypeScript 技能提升到新的水平。 Partial:使所有屬性可選 ...程式設計 發佈於2024-11-02
-
電報 window.open(url, &#_blank&#);在ios上工作很奇怪我正在製作一個電報機器人,我想添加將一些資訊從小型應用程式轉發到聊天的選項。我決定使用 window.open(url, '_blank');在我在 iPhone 上嘗試之前它一直運作良好。我沒有轉發,而是分享(這是一件大事,我正好需要轉發一條訊息)。我有一些如何處理它的想法,但它們...程式設計 發佈於2024-11-02
-
如何使用保留的 CSS 樣式將 HTML 內容儲存為 PDF?使用CSS 將HTML 內容儲存為PDF在Web 開發中,即使將內容匯出為不同格式,保持視覺美觀也至關重要。當嘗試將 HTML 元素儲存為 PDF 時,這可能會帶來挑戰,因為 CSS 樣式可能會在轉換過程中遺失。 對於必須在已儲存的PDF 中保留CSS 的情況,請考慮使用以下方法:建立新視窗: 開啟...程式設計 發佈於2024-11-02
-
為什麼使用 Print_r() 時要為 DateTime 物件新增幻像屬性?Print_r() 變更 DateTime 物件Print_r() 在 DateTime 物件上新增屬性,以便在偵錯期間啟用自省。此行為是 PHP 5.3 中引入的內部功能的副作用,它將幻像公共屬性指派給轉儲到文字的實例。 要避免這些屬性所造成的錯誤,請改用反射。然而,不建議尋找這些屬性,因為它們沒...程式設計 發佈於2024-11-02
-
C 語言的資料結構與演算法:適合初學者的方法在 C 語言中,資料結構和演算法用於組織、儲存和操作資料。資料結構:陣列:有序集合,使用索引存取元素鍊錶:透過指標連結元素,支援動態長度堆疊:先進後出(FILO) 原則佇列:先進先出(FIFO) 原則樹:分級組織資料演算法:排序:依特定順序排序元素搜尋:在集合中尋找元素圖形:處理節點與邊之間的關係實...程式設計 發佈於2024-11-02















學習中文
- 1 走路用中文怎麼說? 走路中文發音,走路中文學習
- 2 坐飛機用中文怎麼說? 坐飞机中文發音,坐飞机中文學習
- 3 坐火車用中文怎麼說? 坐火车中文發音,坐火车中文學習
- 4 坐車用中文怎麼說? 坐车中文發音,坐车中文學習
- 5 開車用中文怎麼說? 开车中文發音,开车中文學習
- 6 游泳用中文怎麼說? 游泳中文發音,游泳中文學習
- 7 騎自行車用中文怎麼說? 骑自行车中文發音,骑自行车中文學習
- 8 你好用中文怎麼說? 你好中文發音,你好中文學習
- 9 謝謝用中文怎麼說? 谢谢中文發音,谢谢中文學習
- 10 How to say goodbye in Chinese? 再见Chinese pronunciation, 再见Chinese learning









