
Simplesmente entendendo as curvas de Bézier.
 Navegar:894
Navegar:894
Imagine se você pudesse usar apenas linhas retas, elipses e círculos, não seria difícil projetar um carro com linhas suaves e uma aparência complexa?
Em 1962, o engenheiro francês Pierre Bézier publicou a curva de Bézier, que foi inicialmente usada para o projeto da carroceria principal dos carros.
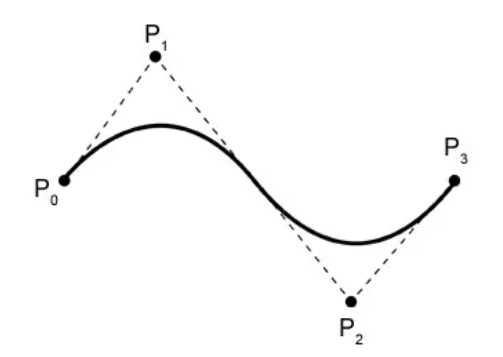
As curvas de Bézier podem definir uma curva suave através de uma série de pontos de controle. A curva sempre passa pelo primeiro e último pontos de controle e é influenciada pela forma dos pontos de controle intermediários. Além disso, as curvas de Bézier têm a propriedade de cascas convexas.
As curvas de Bézier são amplamente utilizadas em computação gráfica e modelagem de imagens, como em animação, design de fontes e design industrial.
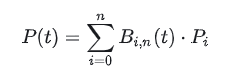
Fórmula
Vamos entender isso.
P(t) representa um ponto na curva em t (t é uma fração, com valor de 0 a 1). O que é um ponto na curva em t? Uma descrição comum da curva é: y = f(x), e por enquanto, vamos entender P(t) como f(x). A diferença é que P(t) é uma representação paramétrica (e o resultado do cálculo é um "vetor" como [x, y]), que será explicado em detalhes posteriormente.
Em seguida, Pi representa o i-ésimo ponto de controle (i começa em 0). Tomando como exemplo a figura acima, existem 4 pontos de controle, que são P0, P1, P2, P3. O n na fórmula é o último índice dos pontos de controle, ou seja, n = 3 (observe que não é o número de pontos de controle, mas sim a contagem menos 1).
Bi,n(t) é a função base de Bernstein, também conhecida como função base. Para cada (i, n) específico existe uma função base diferente correspondente a ele. Se você entender de uma perspectiva ponderada, poderá considerar a função de base como uma função de peso, indicando a "contribuição" do i-ésimo ponto de controle Pi para as coordenadas da curva na posição de t.
A fórmula para a função base é a seguinte:
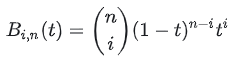
( in) É o número da combinação (quantas maneiras de escolher i entre n?). Quanto ao motivo da função base ter esta aparência, ela pode ser entendida em conexão com o algoritmo De Casteljau (veja mais adiante no texto)
De volta à fórmula P(t), ∑i=0n é o símbolo de soma, indicando que a parte subsequente ( Bi,n(t )⋅Pi ) deve ser somado de i=0 a i=n.
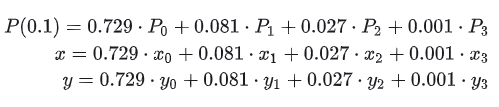
Tomando a figura acima como exemplo, supondo que queremos calcular P(0,1), como fazer? É expandido da seguinte forma:


Substitua t=0,1 para obter:
Representação paramétrica da curva
Aqui cita diretamente um artigo de um internauta (link)
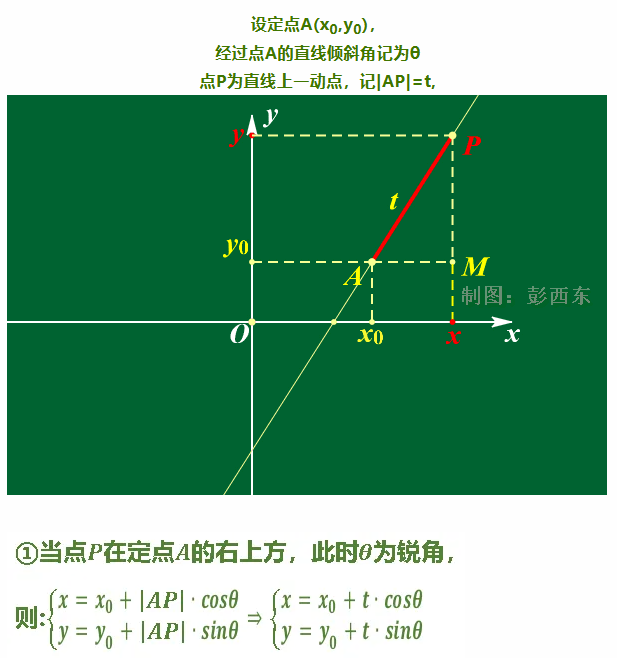
Vamos nos concentrar na fórmula acima.
Como mostrado na figura acima, a linha reta que conhecemos pode ser entendida de outra perspectiva: usando t (ou seja, o comprimento de |AP| do ponto P ao ponto conhecido (x0,y0)), então o ponto P pode ser determinado através das funções trigonométricas acima.
Mais geralmente, pode ser escrito como:
Aqui, P0 é o vetor [x0,y0]e v também é um vetor. Quando somados, P(t)é o vetor [x,y].
Olhando para o círculo novamente:
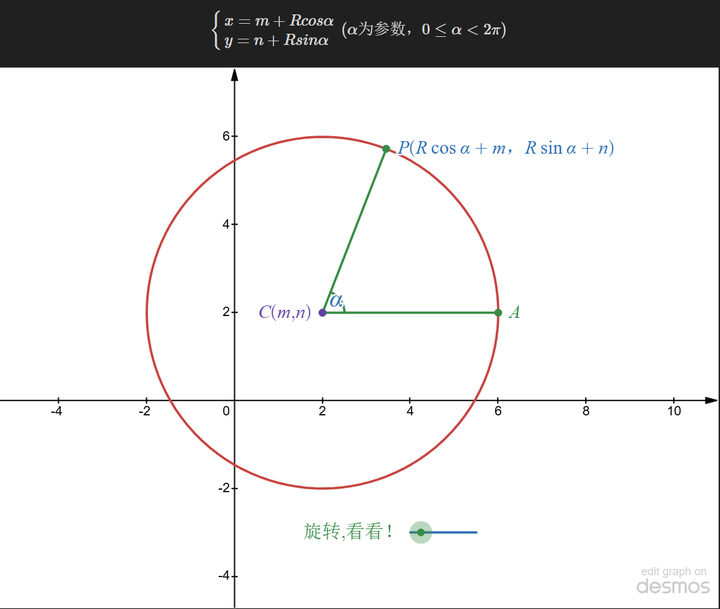
Conforme mostrado no diagrama, o círculo pode ser visto como tendo um centro conhecido, com qualquer ponto do círculo sendo determinado pelo ângulo de rotação e pelo raio. Também pode ser escrito como:
As equações paramétricas mantêm a invariância geométrica e podem representar formas como círculos (onde um x corresponde a vários valores de y).
De Casteljau
O algoritmo De Casteljau é um método usado em aplicações práticas para avaliar e aproximar curvas de Bézier para desenho e outras operações. Comparado ao método de avaliação anterior baseado em definição, é mais rápido e estável, e mais próximo das características das curvas de Bézier.
Aqui, nos referimos a dois artigos: link1 e link2
Em primeiro lugar, é definido o seguinte:
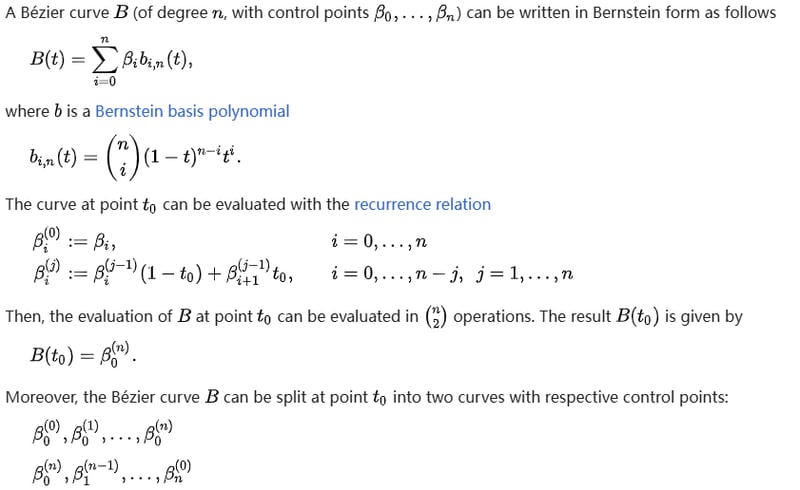
Veja o β acima. É um pouco confuso com os sobrescritos e subscritos; você pode usar a seguinte recursão triangular para compreensão:
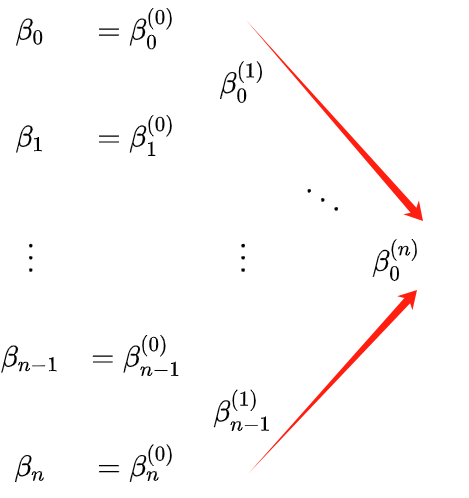
As bordas vermelhas do triângulo na figura acima são os pontos de controle dos dois segmentos divididos por t0. Para entender mais vividamente t0, P(t0) (ou seja, β0(n) ), os pontos de controle das duas curvas, você pode consultar a figura a seguir:
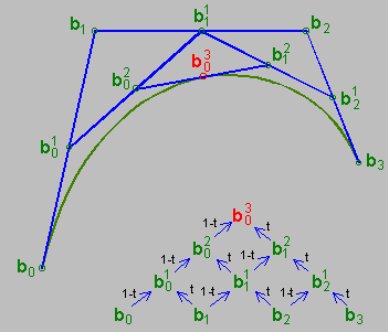
A figura acima demonstra as relações entre vários pontos quando t=0,5.
Na perspectiva da "interpolação", o processo de cálculo também pode ser entendido como:
- Encontrar os pontos médios de cada par de pontos de controle adjacentes (porque t=0,5), ou seja, b01, b11, b21 (por favor, perdoe minha notação; escrever em LaTeX é muito problemático)
- Encontre o ponto médio b02 em b01−b11 e encontre o ponto médio b12 em b11-b21
- Encontre o ponto médio b03 em b02−b12 Na verdade, a essência do algoritmo De Casteljau é interpolação e iteração.
Desenho de curva baseado em De Casteljau
Atualmente, dois métodos são observados.
Um método envolve percorrer t de 0 a 1 com pequenos incrementos de passo (ou seja, 0,01). Cada vez que P(t) é procurado, uma fórmula recursiva é usada para determinar β0(n) .
O outro método envolve buscar P(t=0,5), e então para as duas curvas divididas, P(t=0,5) é buscado respectivamente... Esta subdivisão continua até que a curva seja aproximada.
Implementação
Sempre parece irreal apenas assistir sem praticar.
Então escrevi meu próprio código de implementação para desenho de curvas e o organizei em um kit de ferramentas: Compilelife's Toolkit
O código principal correspondente está aqui
-
 Como posso executar comandos de prompt de comando, incluindo alterações de diretório, em java?Executar comandos do prompt de comando em java Problema: executando comandos de prompt de java pode ser desafio. Embora você possa encontr...Programação Postado em 2025-04-03
Como posso executar comandos de prompt de comando, incluindo alterações de diretório, em java?Executar comandos do prompt de comando em java Problema: executando comandos de prompt de java pode ser desafio. Embora você possa encontr...Programação Postado em 2025-04-03 -
Qual método é mais eficiente para a detecção de ponto em polígono: rastreamento de raio ou path.contains_points?detecção de ponto-em-polígono eficiente em python determinar se um ponto está dentro de um polígono é uma tarefa frequente na geometria computac...Programação Postado em 2025-04-03
-
Quais foram as restrições ao usar o current_timestamp com colunas de registro de data e hora em MySQL antes da versão 5.6.5?restrições em colunas de timestamp com current_timestamp no padrão ou na atualização de cláusulas nas versões MySQL antes de 5.6.5 historicament...Programação Postado em 2025-04-03
-
Como implementar uma função de hash genérico para tuplas em coleções não ordenadas?função de hash genérico para tuplas em coleções não ordenadas o std :: não -ordered_map e std :: uncomered_set contêineres fornecem pesquisa e...Programação Postado em 2025-04-03
-
Como redirecionar vários tipos de usuários (alunos, professores e administradores) para suas respectivas atividades em um aplicativo Firebase?RED: Como redirecionar vários tipos de usuário para as respectivas atividades compreender o problema e um aplicativo de votamento de que é...Programação Postado em 2025-04-03
-
Como verificar se um objeto tem um atributo específico no Python?Método para determinar o atributo de objeto Existence Esta consulta busca um método para verificar a presença de um atributo específico em um ...Programação Postado em 2025-04-03
-
Como analisar números na notação exponencial usando decimal.parse ()?analisando um número da notação exponencial ao tentar analisar uma string expressa em anotação exponencial usando Decimal.parse ("1.2345e...Programação Postado em 2025-04-03
-
Por que não está aparecendo na minha imagem de fundo do CSS?SOLHAÇÃO DE TRABALHO: CSS Imagem de fundo não apareceu Você encontrou um problema em que sua imagem em segundo plano falha, apesar das seguint...Programação Postado em 2025-04-03
-
Como enviar uma solicitação de postagem bruta com o CURL no PHP?como enviar uma solicitação de postagem bruta usando o CURL em php em php, o CURL é uma biblioteca popular para enviar http requests. Este art...Programação Postado em 2025-04-03
-
Como você extrai um elemento aleatório de uma matriz no PHP?seleção aleatória de uma matriz em php, a obtenção de um item aleatório de uma matriz pode ser realizado com ease. Considere a seguinte matriz: ...Programação Postado em 2025-04-03
-
Você pode usar o CSS para colorir a saída do console no Chrome e no Firefox?exibindo cores no javascript Console é possível usar o console do Chrome para exibir texto colorido, como vermelho para erros, laranja para al...Programação Postado em 2025-04-03
-
Objetos-ajuste: a capa falha no IE e na borda, como consertar?object-fit: a capa falha no ie e borda, como corrigir? utilizando objeto-fit: cover; No CSS, para manter a altura consistente da imagem funcio...Programação Postado em 2025-04-03
-
Como resolver \ "Recusou -se a carregar erros de script ..." devido à política de segurança de conteúdo do Android?revelando o mistério: Erros de diretiva de política de segurança do conteúdo encontrando o erro enigmático "recusou -se a carregar o scri...Programação Postado em 2025-04-03
-
Como posso selecionar programaticamente todo o texto dentro de uma div em mouse clique?selecionando programaticamente o texto div no mouse click question dado um elemento Div com conteúdo de texto, como o usuário pode selecionar ...Programação Postado em 2025-04-03
-
Como fazer upload de arquivos com parâmetros adicionais usando java.net.urlConnection e codificação multipartida/formulário?carregando arquivos com http requests para fazer upload de arquivos para um servidor http e também enviando parâmetros adicionais, java.net.ur...Programação Postado em 2025-04-03















Estude chinês
- 1 Como se diz “andar” em chinês? 走路 Pronúncia chinesa, 走路 aprendizagem chinesa
- 2 Como se diz “pegar um avião” em chinês? 坐飞机 Pronúncia chinesa, 坐飞机 aprendizagem chinesa
- 3 Como se diz “pegar um trem” em chinês? 坐火车 Pronúncia chinesa, 坐火车 aprendizagem chinesa
- 4 Como se diz “pegar um ônibus” em chinês? 坐车 Pronúncia chinesa, 坐车 aprendizagem chinesa
- 5 Como se diz dirigir em chinês? 开车 Pronúncia chinesa, 开车 aprendizagem chinesa
- 6 Como se diz nadar em chinês? 游泳 Pronúncia chinesa, 游泳 aprendizagem chinesa
- 7 Como se diz andar de bicicleta em chinês? 骑自行车 Pronúncia chinesa, 骑自行车 aprendizagem chinesa
- 8 Como você diz olá em chinês? 你好Pronúncia chinesa, 你好Aprendizagem chinesa
- 9 Como você agradece em chinês? 谢谢Pronúncia chinesa, 谢谢Aprendizagem chinesa
- 10 How to say goodbye in Chinese? 再见Chinese pronunciation, 再见Chinese learning









