
Windows、Linux、macOS 用の Python バーコード スキャナーを構築する方法
2024 年 11 月 2 日に公開
 ブラウズ:635
ブラウズ:635
バーコード スキャンは、小売、物流から医療に至るまで、さまざまな業界で不可欠なツールとなっています。デスクトップ プラットフォームでは、手動でデータを入力することなく情報を迅速に取得して処理できるため、時間を節約し、エラーを減らすことができます。このチュートリアルでは、Windows、Linux 用の Python バーコード スキャナを構築することで、Dynamsoft Capture Vision SDKの機能を引き続き探索していきます。 、macOS。
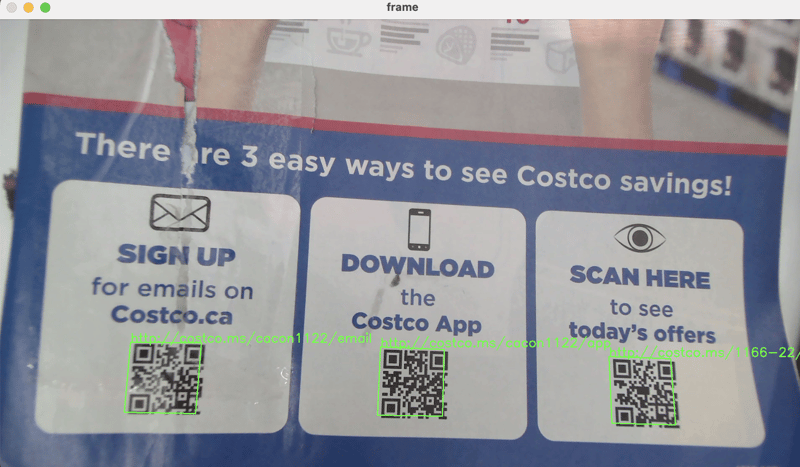
macOS での Python バーコード スキャナーのデモ
前提条件
Dynamsoft Capture Vision トライアル ライセンス: Dynamsoft Capture Vision SDK の 30 日間のトライアル ライセンス キーを取得します。
-
Python パッケージ: 次のコマンドを使用して、必要な Python パッケージをインストールします:
pip install dynamsoft-capture-vision-bundle opencv-python
これらのパッケージは何のためにありますか?
- dynamsoft-capture-vision-bundle は、Python 用の Dynamsoft Capture Vision SDK です。
- opencv-python はカメラ フレームをキャプチャし、処理された画像結果を表示します。
静止画像からバーコードを読み取る
Dynamsoft Capture Vision SDK は、さまざまな画像処理タスクと統合された統合フレームワークであるため、PresetTemplate 名を Capture() メソッドに渡すことで、画像処理モードを簡単に切り替えることができます。
Dynamsoft Capture Vision SDK の組み込みテンプレート
次のコード スニペットは、Dynamsoft Capture Vision SDK の組み込みの PresetTemplate 列挙を示しています。
class EnumPresetTemplate(Enum):
PT_DEFAULT = _DynamsoftCaptureVisionRouter.getPT_DEFAULT()
PT_READ_BARCODES = _DynamsoftCaptureVisionRouter.getPT_READ_BARCODES()
PT_RECOGNIZE_TEXT_LINES = _DynamsoftCaptureVisionRouter.getPT_RECOGNIZE_TEXT_LINES()
PT_DETECT_DOCUMENT_BOUNDARIES = (
_DynamsoftCaptureVisionRouter.getPT_DETECT_DOCUMENT_BOUNDARIES()
)
PT_DETECT_AND_NORMALIZE_DOCUMENT = (
_DynamsoftCaptureVisionRouter.getPT_DETECT_AND_NORMALIZE_DOCUMENT()
)
PT_NORMALIZE_DOCUMENT = _DynamsoftCaptureVisionRouter.getPT_NORMALIZE_DOCUMENT()
PT_READ_BARCODES_SPEED_FIRST = (
_DynamsoftCaptureVisionRouter.getPT_READ_BARCODES_SPEED_FIRST()
)
PT_READ_BARCODES_READ_RATE_FIRST = (
_DynamsoftCaptureVisionRouter.getPT_READ_BARCODES_READ_RATE_FIRST()
)
PT_READ_SINGLE_BARCODE = _DynamsoftCaptureVisionRouter.getPT_READ_SINGLE_BARCODE()
PT_RECOGNIZE_NUMBERS = _DynamsoftCaptureVisionRouter.getPT_RECOGNIZE_NUMBERS()
PT_RECOGNIZE_LETTERS = _DynamsoftCaptureVisionRouter.getPT_RECOGNIZE_LETTERS()
PT_RECOGNIZE_NUMBERS_AND_LETTERS = (
_DynamsoftCaptureVisionRouter.getPT_RECOGNIZE_NUMBERS_AND_LETTERS()
)
PT_RECOGNIZE_NUMBERS_AND_UPPERCASE_LETTERS = (
_DynamsoftCaptureVisionRouter.getPT_RECOGNIZE_NUMBERS_AND_UPPERCASE_LETTERS()
)
PT_RECOGNIZE_UPPERCASE_LETTERS = (
_DynamsoftCaptureVisionRouter.getPT_RECOGNIZE_UPPERCASE_LETTERS()
)
PT_DEFAULT テンプレートは、ドキュメント検出、MRZ 認識、バーコード検出などの複数のタスクをサポートします。特にバーコード検出のパフォーマンスを最適化するには、テンプレートを EnumPresetTemplate.PT_READ_BARCODES.value.に設定します。
バーコード検出用の Python コード前のドキュメント検出と MRZ 認識の例を参照すると、次のコードを使用して静止画像からバーコードを読み取ることができます:
class EnumPresetTemplate(Enum):
PT_DEFAULT = _DynamsoftCaptureVisionRouter.getPT_DEFAULT()
PT_READ_BARCODES = _DynamsoftCaptureVisionRouter.getPT_READ_BARCODES()
PT_RECOGNIZE_TEXT_LINES = _DynamsoftCaptureVisionRouter.getPT_RECOGNIZE_TEXT_LINES()
PT_DETECT_DOCUMENT_BOUNDARIES = (
_DynamsoftCaptureVisionRouter.getPT_DETECT_DOCUMENT_BOUNDARIES()
)
PT_DETECT_AND_NORMALIZE_DOCUMENT = (
_DynamsoftCaptureVisionRouter.getPT_DETECT_AND_NORMALIZE_DOCUMENT()
)
PT_NORMALIZE_DOCUMENT = _DynamsoftCaptureVisionRouter.getPT_NORMALIZE_DOCUMENT()
PT_READ_BARCODES_SPEED_FIRST = (
_DynamsoftCaptureVisionRouter.getPT_READ_BARCODES_SPEED_FIRST()
)
PT_READ_BARCODES_READ_RATE_FIRST = (
_DynamsoftCaptureVisionRouter.getPT_READ_BARCODES_READ_RATE_FIRST()
)
PT_READ_SINGLE_BARCODE = _DynamsoftCaptureVisionRouter.getPT_READ_SINGLE_BARCODE()
PT_RECOGNIZE_NUMBERS = _DynamsoftCaptureVisionRouter.getPT_RECOGNIZE_NUMBERS()
PT_RECOGNIZE_LETTERS = _DynamsoftCaptureVisionRouter.getPT_RECOGNIZE_LETTERS()
PT_RECOGNIZE_NUMBERS_AND_LETTERS = (
_DynamsoftCaptureVisionRouter.getPT_RECOGNIZE_NUMBERS_AND_LETTERS()
)
PT_RECOGNIZE_NUMBERS_AND_UPPERCASE_LETTERS = (
_DynamsoftCaptureVisionRouter.getPT_RECOGNIZE_NUMBERS_AND_UPPERCASE_LETTERS()
)
PT_RECOGNIZE_UPPERCASE_LETTERS = (
_DynamsoftCaptureVisionRouter.getPT_RECOGNIZE_UPPERCASE_LETTERS()
)
注: LICENSE-KEY を有効なライセンス キーに置き換えます。マルチバーコード画像を使用した Python バーコード リーダーのテスト
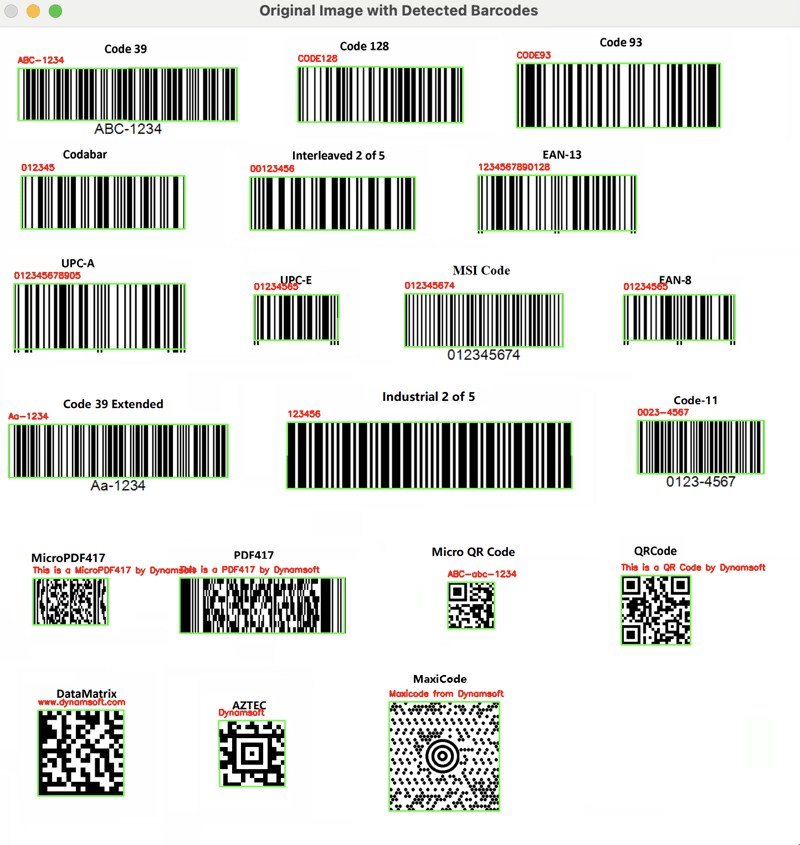
単一の画像から複数のバーコードをデコードすることは、小売業や物流業界で一般的な使用例です。次の画像には、さまざまな形式の複数のバーコードが含まれています:
画像ファイルからバーコードを読み取るときは、メインスレッドで Capture() メソッドを呼び出します。ただし、Web カメラからのリアルタイム ビデオ ストリームを処理するには、メイン スレッドのブロックを避けるために別のアプローチが必要です。 Dynamsoft Capture Vision SDK は、リアルタイム ビデオ フレームを処理し、ネイティブ C ワーカー スレッドで非同期に処理するための組み込みメカニズムを提供します。これを実装するには、ImageSourceAdapter クラスと CapturedResultReceiver クラスを拡張して、それぞれ画像データとキャプチャ結果を処理し、start_capturing() メソッドを呼び出してビデオ ストリームの処理を開始します。
class EnumPresetTemplate(Enum):
PT_DEFAULT = _DynamsoftCaptureVisionRouter.getPT_DEFAULT()
PT_READ_BARCODES = _DynamsoftCaptureVisionRouter.getPT_READ_BARCODES()
PT_RECOGNIZE_TEXT_LINES = _DynamsoftCaptureVisionRouter.getPT_RECOGNIZE_TEXT_LINES()
PT_DETECT_DOCUMENT_BOUNDARIES = (
_DynamsoftCaptureVisionRouter.getPT_DETECT_DOCUMENT_BOUNDARIES()
)
PT_DETECT_AND_NORMALIZE_DOCUMENT = (
_DynamsoftCaptureVisionRouter.getPT_DETECT_AND_NORMALIZE_DOCUMENT()
)
PT_NORMALIZE_DOCUMENT = _DynamsoftCaptureVisionRouter.getPT_NORMALIZE_DOCUMENT()
PT_READ_BARCODES_SPEED_FIRST = (
_DynamsoftCaptureVisionRouter.getPT_READ_BARCODES_SPEED_FIRST()
)
PT_READ_BARCODES_READ_RATE_FIRST = (
_DynamsoftCaptureVisionRouter.getPT_READ_BARCODES_READ_RATE_FIRST()
)
PT_READ_SINGLE_BARCODE = _DynamsoftCaptureVisionRouter.getPT_READ_SINGLE_BARCODE()
PT_RECOGNIZE_NUMBERS = _DynamsoftCaptureVisionRouter.getPT_RECOGNIZE_NUMBERS()
PT_RECOGNIZE_LETTERS = _DynamsoftCaptureVisionRouter.getPT_RECOGNIZE_LETTERS()
PT_RECOGNIZE_NUMBERS_AND_LETTERS = (
_DynamsoftCaptureVisionRouter.getPT_RECOGNIZE_NUMBERS_AND_LETTERS()
)
PT_RECOGNIZE_NUMBERS_AND_UPPERCASE_LETTERS = (
_DynamsoftCaptureVisionRouter.getPT_RECOGNIZE_NUMBERS_AND_UPPERCASE_LETTERS()
)
PT_RECOGNIZE_UPPERCASE_LETTERS = (
_DynamsoftCaptureVisionRouter.getPT_RECOGNIZE_UPPERCASE_LETTERS()
)
説明
- FrameFetcher クラスは、組み込みバッファにフレーム データをフィードするための ImageSourceAdapter インターフェイスを実装します。
- MyCapturedResultReceiver クラスは、CapturedResultReceiver インターフェイスを実装します。 on_captured_result_received メソッドはネイティブ C ワーカー スレッドで実行され、CapturedResult オブジェクトをメイン スレッドに送信し、その後の使用のためにスレッドセーフ キューに保存されます。
- CapturedResult には、複数の CapturedResultItem オブジェクトが含まれます。 CRIT_BARCODE タイプは、認識されたバーコード データを表します。
https://github.com/yushulx/python-barcode-qrcode-sdk/tree/main/examples/official/10.x
リリースステートメント
この記事は次の場所に転載されています: https://dev.to/yushulx/how-to-build-a-python-barcode-scanner-for-windows-linux-and-macos-15d?1 侵害がある場合は、 Study_golang@163 .comdelete に連絡してください
最新のチュートリアル
もっと>
-
 なぜ私の線形勾配の背景にストライプがあるのか、どうすればそれらを修正できますか?リニアグラデーションからの背景ストライプを追放する 背景に線形勾配プロパティを使用する場合、方向が上または下に設定されているときに顕著なストライプに遭遇する場合があります。これらの見苦しいアーティファクトは、複雑なバックグラウンド伝播現象に起因する可能性があります。その後、線形勾配はこの高...プログラミング 2025-07-12に投稿されました
なぜ私の線形勾配の背景にストライプがあるのか、どうすればそれらを修正できますか?リニアグラデーションからの背景ストライプを追放する 背景に線形勾配プロパティを使用する場合、方向が上または下に設定されているときに顕著なストライプに遭遇する場合があります。これらの見苦しいアーティファクトは、複雑なバックグラウンド伝播現象に起因する可能性があります。その後、線形勾配はこの高...プログラミング 2025-07-12に投稿されました -
非同期操作を同時に実行し、JavaScriptでエラーを正しく処理する方法は?並行操作実行を待つ 問題のコードスニペットは非同期操作を実行する際の問題に遭遇します: この実装は、次の操作を開始する前に各操作の完了を順次待ちます。同時実行を有効にするには、修正されたアプローチが必要です。 getValue2async(); const value1 = awa...プログラミング 2025-07-12に投稿されました
-
最大カウントを見つけるときにmysqlで\ "無効なグループ関数の使用を解決する方法\"エラーは?mysql を使用して最大カウントを取得する方法mysqlでは、次のコマンドを使用して特定の列によってグループ化された値の最大値を見つけようとする際に問題に遭遇する可能性があります。 emp1グループからmax(count(*))を名前で選択します。 エラー1111(HY000):グル...プログラミング 2025-07-12に投稿されました
-
CSS「コンテンツ」プロパティを使用してFirefoxが画像を表示しないのはなぜですか?firefox のコンテンツURLを使用して画像を表示します。これは、提供されたCSSクラスで見ることができます: .googlePic { content: url('../../img/googlePlusIcon.PNG'); margin-top: -6.5%;...プログラミング 2025-07-12に投稿されました
-
Silverlight linqクエリで「クエリパターンの実装が見つからなかった」エラーを取得するのはなぜですか?Queryパターンの実装不在:「silverlightアプリケーションで「&&&&] を解決する」cleryパターンの不在、linqを使用してデータベース接続を確立しようとする試みは、「クエリパターンの実装」を見つけることができませんでした。このエラーは通常、LINQネームスペースが省略...プログラミング 2025-07-12に投稿されました
-
フォームリフレッシュ後に重複した提出を防ぐ方法は?を更新することで重複した提出を防ぐ Web開発で、フォームの提出後にページが更新された場合に重複した提出の問題に遭遇することが一般的です。これに対処するには、次のアプローチを検討してください。 if(isset($ _ post ['name'])){ ...プログラミング 2025-07-12に投稿されました
-
Javaの「DD/MM/YYYY HH:MM:SS.SS」形式で現在の日付と時刻を正しく表示するにはどうすればよいですか?「dd/mm/yyyy hh:mm:ss.ss」形式で現在の日付と時刻を表示する方法。異なるフォーマットパターンを持つさまざまなSimpleDateFormatインスタンスの使用にあります。 java.text.simpledateformat; java.util.calendarをインポ...プログラミング 2025-07-12に投稿されました
-
交換指令を使用して、GO modのモジュールパスの不一致を解決する方法は?go mod のモジュールパスの不一致を克服するgo modを利用する場合、輸入パッケージと実際の輸入パスの間のパスミスマッチとのパスミスマッチで、第三者パッケージが別のパッケージをインポートする紛争に遭遇する可能性があります。エコーされたメッセージで示されているように、これはGo M...プログラミング 2025-07-12に投稿されました
-
GOコンパイラでコンパイルの最適化をカスタマイズするにはどうすればよいですか?goコンパイラ のコンピレーション最適化のカスタマイズGOのデフォルトのコンパイルプロセスは、特定の最適化戦略に従います。ただし、ユーザーは特定の要件に対してこれらの最適化を調整する必要がある場合があります。これは、コンパイラが事前に定義されたヒューリスティックに基づいて最適化を自動的に...プログラミング 2025-07-12に投稿されました
-
右からCSSの背景画像を見つける方法は?右からの背景画像をCSS をWeb開発の領域で配置すると、要素内に背景画像を正確に配置することが望ましいことがよくあります。要素の左側に関連する背景画像を配置するのは簡単ですが、右から特定の数のピクセルをオフセットするにはどうすればよいですか? /を右から10pxを配置するための動作...プログラミング 2025-07-12に投稿されました
-
\ "while(1)vs。for(;;):コンパイラの最適化はパフォーマンスの違いを排除しますか?\"while(1)vs。for(;;):速度の違いはありますか? loops? 回答: では、ほとんどの最新のコンパイラでは、(1)と(;;)。コンパイラー: perl: の両方が(1)と(;;)が同じオプコードをもたらします。 1 入力 - > 2を入力します 2 NextSt...プログラミング 2025-07-12に投稿されました
-
PHPの配列からランダムな要素をどのように抽出しますか?配列からのランダム選択 は、配列からランダムなアイテムを取得することができます。次の配列を検討してください: $items = [523, 3452, 334, 31, 5346]; この配列からランダムなアイテムを取得するために、array_rand()関数を利用することは効果的な解決策です...プログラミング 2025-07-12に投稿されました
-
Go Webアプリケーションはいつデータベース接続を閉じますか?Go Webアプリケーションのデータベース接続の管理 PostgreSQLなどのデータベースを使用する単純なGO Webアプリケーションで、データベース接続の閉鎖のタイミングが考慮されます。これは、無期限に実行されるアプリケーションでこれをいつ、どのように処理するかを深く掘り下げます。 f...プログラミング 2025-07-12に投稿されました
-
Javaが一般的な配列を作成できないのはなぜですか?generic array作成エラー 質問: ; public static ArrayList<myObject>[] a = new ArrayList<myObject>[2];プログラミング 2025-07-12に投稿されました















中国語を勉強する
- 1 「歩く」は中国語で何と言いますか? 走路 中国語の発音、走路 中国語学習
- 2 「飛行機に乗る」は中国語で何と言いますか? 坐飞机 中国語の発音、坐飞机 中国語学習
- 3 「電車に乗る」は中国語で何と言いますか? 坐火车 中国語の発音、坐火车 中国語学習
- 4 「バスに乗る」は中国語で何と言いますか? 坐车 中国語の発音、坐车 中国語学習
- 5 中国語でドライブは何と言うでしょう? 开车 中国語の発音、开车 中国語学習
- 6 水泳は中国語で何と言うでしょう? 游泳 中国語の発音、游泳 中国語学習
- 7 中国語で自転車に乗るってなんて言うの? 骑自行车 中国語の発音、骑自行车 中国語学習
- 8 中国語で挨拶はなんて言うの? 你好中国語の発音、你好中国語学習
- 9 中国語でありがとうってなんて言うの? 谢谢中国語の発音、谢谢中国語学習
- 10 How to say goodbye in Chinese? 再见Chinese pronunciation, 再见Chinese learning









