
बस बेज़ियर कर्व्स को समझना।
 ब्राउज़ करें:563
ब्राउज़ करें:563
कल्पना करें यदि आप केवल सीधी रेखाओं, दीर्घवृत्त और वृत्तों का उपयोग कर सकते हैं, तो क्या चिकनी रेखाओं और जटिल उपस्थिति वाली कार को डिजाइन करना मुश्किल नहीं होगा?
1962 में, फ्रांसीसी इंजीनियर पियरे बेज़ियर ने बेज़ियर कर्व प्रकाशित किया, जिसका उपयोग शुरू में कारों के मुख्य बॉडी डिज़ाइन के लिए किया गया था।
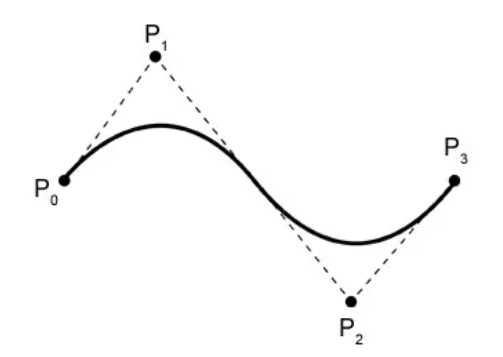
बेज़ियर वक्र नियंत्रण बिंदुओं की एक श्रृंखला के माध्यम से एक चिकनी वक्र को परिभाषित कर सकते हैं। वक्र हमेशा पहले और आखिरी नियंत्रण बिंदुओं से होकर गुजरता है और मध्यवर्ती नियंत्रण बिंदुओं के आकार से प्रभावित होता है। इसके अतिरिक्त, बेज़ियर वक्रों में उत्तल पतवारों का गुण होता है।
बेज़ियर कर्व्स का व्यापक रूप से कंप्यूटर ग्राफिक्स और छवि मॉडलिंग में उपयोग किया जाता है, जैसे एनीमेशन, फ़ॉन्ट डिज़ाइन और औद्योगिक डिज़ाइन में।
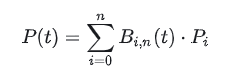
FORMULA
आइये इसे समझते हैं।
पी(टी) टी पर वक्र पर एक बिंदु का प्रतिनिधित्व करता है (टी एक अंश है, जिसका मान 0 से 1 तक है)। वक्र पर t पर एक बिंदु क्या है? एक सामान्य वक्र विवरण है: y = f(x), और अभी के लिए, आइए P(t) को f(x) के रूप में समझें। अंतर यह है कि P(t) एक पैरामीट्रिक प्रतिनिधित्व है (और गणना परिणाम एक "वेक्टर" है जैसे [x, y]), जिसे बाद में विस्तार से समझाया जाएगा।
इसके बाद, पाई आई-वें नियंत्रण बिंदु का प्रतिनिधित्व करता है (आई 0 से शुरू होता है)। उपरोक्त चित्र को उदाहरण के रूप में लेते हुए, 4 नियंत्रण बिंदु हैं, जो P0, P1, P2, P3 हैं। सूत्र में n नियंत्रण बिंदुओं का अंतिम सूचकांक है, यानी, n = 3 (ध्यान दें कि यह नियंत्रण बिंदुओं की संख्या नहीं है, बल्कि गिनती शून्य से 1 है)।
Bi,n(t) बर्नस्टीन आधार फ़ंक्शन है, जिसे आधार फ़ंक्शन के रूप में भी जाना जाता है। प्रत्येक विशिष्ट (i, n) के लिए, उसके अनुरूप एक अलग आधार फ़ंक्शन होता है। यदि आप भारित परिप्रेक्ष्य से समझते हैं, तो आप आधार फ़ंक्शन को वज़न फ़ंक्शन के रूप में मान सकते हैं, जो टी की स्थिति में वक्र निर्देशांक में आई-वें नियंत्रण बिंदु पीआई के "योगदान" को दर्शाता है।
आधार फ़ंक्शन का सूत्र इस प्रकार है:
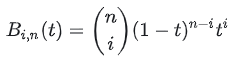
( in) संयोजन संख्या है (n में से i को चुनने के कितने तरीके हैं?)। आधार फ़ंक्शन इस तरह क्यों दिखता है, इसे डी कैस्टेलजौ एल्गोरिदम के संबंध में समझा जा सकता है (पाठ में बाद में देखें)
P(t) सूत्र पर वापस, ∑i=0n योग चिह्न है, जो दर्शाता है कि अगला भाग ( Bi,n(टी )⋅Pi ) का योग i=0 से i=n तक किया जाना है।
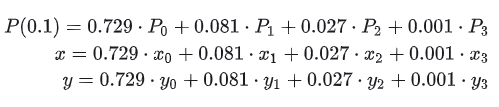
उपरोक्त चित्र को एक उदाहरण के रूप में लेते हुए, मान लें कि हम P(0.1) की गणना करना चाहते हैं, इसे कैसे करें? इसका विस्तार इस प्रकार किया गया है:


प्राप्त करने के लिए t=0.1 प्रतिस्थापित करें:
वक्र का पैरामीट्रिक प्रतिनिधित्व
यहां सीधे तौर पर एक नेटिज़न का लेख उद्धृत किया गया है (लिंक)
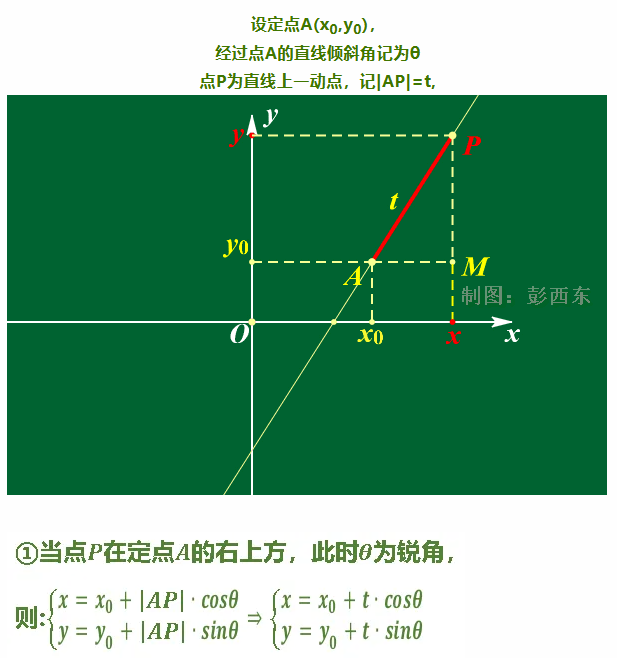
आइए उपरोक्त सूत्र पर ध्यान केंद्रित करें।
जैसा कि ऊपर चित्र में दिखाया गया है, जिस सीधी रेखा से हम परिचित हैं, उसे दूसरे परिप्रेक्ष्य से समझा जा सकता है: t (यानी, बिंदु P से ज्ञात बिंदु (x0,y0) तक |AP| की लंबाई) का उपयोग करते हुए, तब बिंदु P को उपरोक्त त्रिकोणमितीय कार्यों के माध्यम से निर्धारित किया जा सकता है।
अधिक सामान्यतः, इसे इस प्रकार लिखा जा सकता है:
यहां, P0 वेक्टर है [x0,y0]और v भी एक वेक्टर है। जब एक साथ जोड़ा जाता है, तो P(t) वेक्टर [x,y] होता है।
वृत्त को फिर से देख रहे हैं:
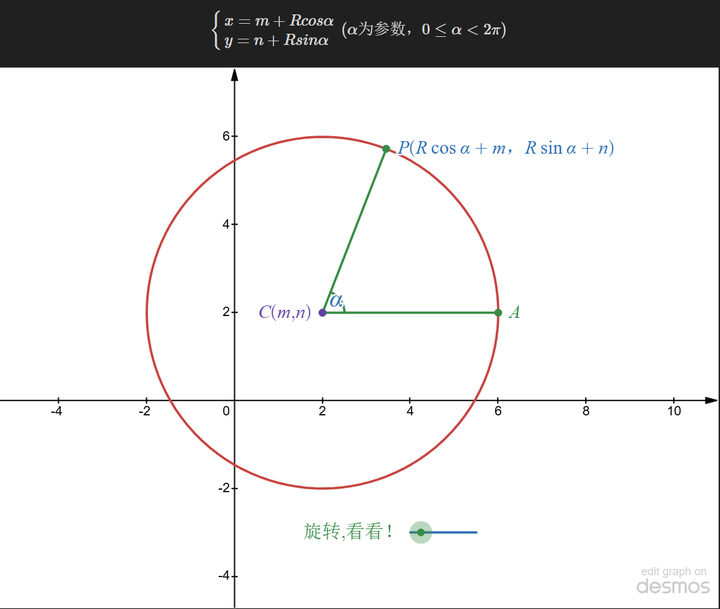
जैसा कि चित्र में दिखाया गया है, वृत्त को एक ज्ञात केंद्र के रूप में देखा जा सकता है, वृत्त पर कोई भी बिंदु घूर्णन कोण और त्रिज्या द्वारा निर्धारित किया जाता है। इसे इस प्रकार भी लिखा जा सकता है:
पैरामीट्रिक समीकरण ज्यामितीय अपरिवर्तनीयता बनाए रखते हैं और वृत्त जैसी आकृतियों का प्रतिनिधित्व कर सकते हैं (जहां एक x एकाधिक y मानों से मेल खाता है)।
डी कैस्टेलजौ
डी कैस्टेलजौ एल्गोरिदम एक ऐसी विधि है जिसका उपयोग व्यावहारिक अनुप्रयोगों में ड्राइंग और अन्य कार्यों के लिए बेज़ियर वक्रों का मूल्यांकन और अनुमान लगाने के लिए किया जाता है। पिछली परिभाषा-आधारित मूल्यांकन पद्धति की तुलना में, यह तेज़ और अधिक स्थिर है, और बेज़ियर वक्रों की विशेषताओं के करीब है।
यहां, हम दो लेखों का संदर्भ देते हैं: लिंक1 और लिंक2
सबसे पहले, निम्नलिखित को परिभाषित किया गया है:
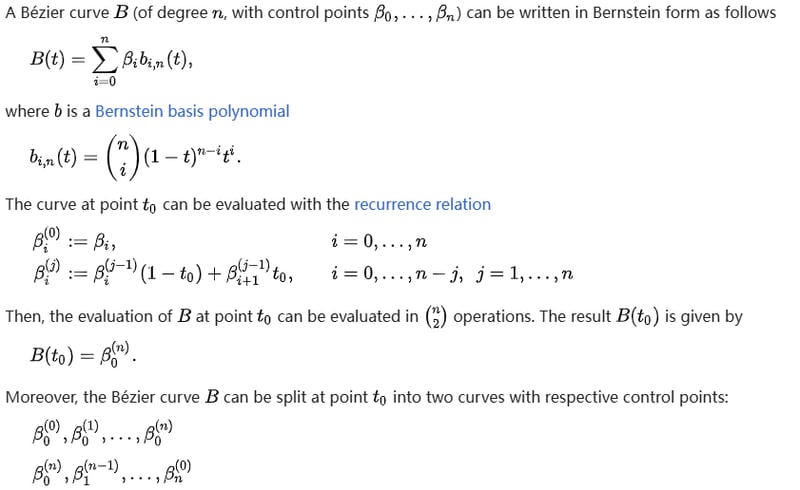
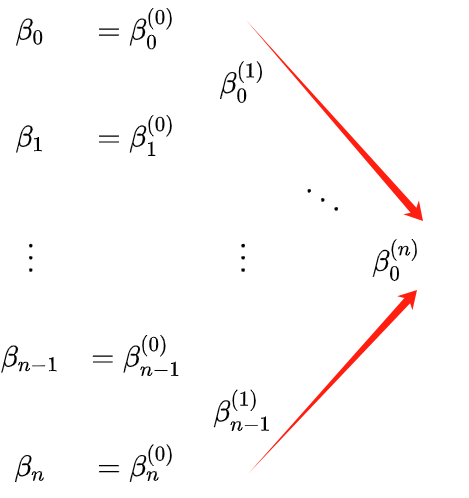
उपरोक्त β को देखें। सुपरस्क्रिप्ट और सबस्क्रिप्ट को लेकर यह थोड़ा भ्रमित करने वाला है; आप समझने के लिए निम्नलिखित त्रिकोणीय पुनरावर्तन का उपयोग कर सकते हैं:
उपरोक्त चित्र में त्रिभुज के लाल किनारे t0 द्वारा विभाजित दो खंडों के नियंत्रण बिंदु हैं। t0, P(t0) को अधिक स्पष्ट रूप से समझने के लिए, β0(n) ), दो वक्रों के नियंत्रण बिंदु, आप निम्न चित्र देख सकते हैं:
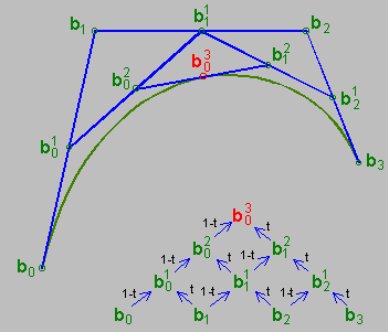
उपरोक्त चित्र विभिन्न बिंदुओं के बीच संबंधों को दर्शाता है जब t=0.5।
"इंटरपोलेशन" के परिप्रेक्ष्य से, गणना प्रक्रिया को इस प्रकार भी समझा जा सकता है:
- आसन्न नियंत्रण बिंदुओं की प्रत्येक जोड़ी के मध्यबिंदु ढूँढना (क्योंकि t=0.5), यानी, b01, b11, b21 (कृपया मेरे नोटेशन को क्षमा करें; LaTeX में लिखना बहुत परेशानी भरा है)
- b01−b11 पर मध्यबिंदु b02 ढूंढें, और b11-b21 पर मध्यबिंदु b12 ढूंढें
- b02−b12 पर मध्यबिंदु b03 खोजें वास्तव में, डी कास्टेलजौ एल्गोरिथ्म का सार प्रक्षेप और पुनरावृत्ति है।
डी कास्टेलजौ पर आधारित वक्र रेखांकन
वर्तमान में, दो विधियाँ देखी गई हैं।
एक विधि में छोटे चरण वृद्धि के साथ 0 से 1 तक ट्रैवर्सिंग शामिल है (यानी। 0.01). हर बार जब P(t) मांगा जाता है, तो निर्धारित करने के लिए एक पुनरावर्ती सूत्र का उपयोग किया जाता है β0(n) .
अन्य विधि में P(t=0.5) की तलाश शामिल है, और फिर दो विभाजित वक्रों के लिए, क्रमशः P(t=0.5) की मांग की जाती है... यह उपखंड तब तक जारी रहता है जब तक कि वक्र अनुमानित न हो जाए।
कार्यान्वयन
बिना अभ्यास के सिर्फ देखना हमेशा अवास्तविक लगता है।
इसलिए मैंने कर्व ड्राइंग के लिए अपना स्वयं का कार्यान्वयन कोड लिखा और इसे एक टूलकिट में व्यवस्थित किया: कंपाइलिफ़्स टूलकिट
संबंधित कोर कोड यहां है
-
 विंडोज फॉर्म में पिक्चरबॉक्स में पेंट इवेंट के साथ कस्टम ड्राइंग विधियों को कैसे एकीकृत करें?] हालाँकि, पिक्चरबॉक्स के पेंट घटना के साथ कस्टम ड्राइंग विधियों को कुशलता से एकीकृत करना सावधानीपूर्वक विचार की आवश्यकता है। यह गाइड बताता है क...प्रोग्रामिंग 2025-04-13 को पोस्ट किया गया
विंडोज फॉर्म में पिक्चरबॉक्स में पेंट इवेंट के साथ कस्टम ड्राइंग विधियों को कैसे एकीकृत करें?] हालाँकि, पिक्चरबॉक्स के पेंट घटना के साथ कस्टम ड्राइंग विधियों को कुशलता से एकीकृत करना सावधानीपूर्वक विचार की आवश्यकता है। यह गाइड बताता है क...प्रोग्रामिंग 2025-04-13 को पोस्ट किया गया -
मैं नंबर-केवल आउटपुट के साथ एकल अंक मान्यता के लिए pytesseract को कैसे कॉन्फ़िगर कर सकता हूं?] इस समस्या को संबोधित करने के लिए, हम Tesseract के कॉन्फ़िगरेशन विकल्पों की बारीकियों में तल्लीन करते हैं। एकल वर्ण मान्यता के लिए, उपयुक्त PSM 10 है...प्रोग्रामिंग 2025-04-13 को पोस्ट किया गया
-
एक पांडस डेटाफ्रेम कॉलम को डेटटाइम प्रारूप में कैसे परिवर्तित करें और तिथि तक फ़िल्टर करें?] अस्थायी डेटा के साथ काम करते समय, टाइमस्टैम्प शुरू में तार के रूप में दिखाई दे सकते हैं, लेकिन सटीक विश्लेषण के लिए एक डेटाइम प्रारूप में परिवर्तित ...प्रोग्रामिंग 2025-04-13 को पोस्ट किया गया
-
मुझे अपने लिनक्स सर्वर पर आर्काइव_जिप स्थापित करने के बाद एक \ "क्लास \ 'ziparchive \' नहीं मिला \" त्रुटि क्यों मिल रही है?घातक त्रुटि: घातक त्रुटि: वर्ग Ziparchive में नहीं मिला ... कारण: इस समस्या को हल करें, इन चरणों का पालन करें: Fatal error: Class ZipArchiv...प्रोग्रामिंग 2025-04-13 को पोस्ट किया गया
-
संस्करण 5.6.5 से पहले MySQL में टाइमस्टैम्प कॉलम के साथ current_timestamp का उपयोग करने पर क्या प्रतिबंध थे?] Current_timestamp क्लॉज। यह सीमा INT, BigInt, और SmallInt पूर्णांक को वापस बढ़ाती है जब उन्हें शुरू में 2008 में पेश किया गया था। यह सीमा विरासत क...प्रोग्रामिंग 2025-04-13 को पोस्ट किया गया
-
Sqlalchemy फ़िल्टर क्लॉज़ में `Flake8` फ्लैगिंग बूलियन तुलना क्यों है?] हालांकि, यह आम तौर पर "यदि कंडे गलत है:" या "अगर कंडे नहीं:" का उपयोग करने के लिए अनुशंसित है, तो बूलियन तुलनाओं के लिए कहीं और,...प्रोग्रामिंग 2025-04-13 को पोस्ट किया गया
-
रिप्लेस डायरेक्टिव का उपयोग करके GO MOD में मॉड्यूल पथ विसंगतियों को कैसे हल करें?यह गूँज के संदेशों द्वारा प्रदर्शित होने के कारण, ` github.com/coreos/etcd/client द्वारा github.com/coreos/tcd/client.test आयात आयात github.co...प्रोग्रामिंग 2025-04-13 को पोस्ट किया गया
-
PHP सरणी कुंजी-मूल्य विसंगतियाँ: 07 और 08 के जिज्ञासु मामले को समझना] PHP में, एक असामान्य मुद्दा तब उत्पन्न होता है जब कुंजियों में 07 या 08 जैसे संख्यात्मक मान होते हैं। Print_r ($ महीने) चलाना अप्रत्याशित परिणाम देत...प्रोग्रामिंग 2025-04-13 को पोस्ट किया गया
-
मैं पांडा डेटाफ्रेम में कुशलता से कॉलम का चयन कैसे करूं?] पंडों में, कॉलम का चयन करने के लिए विभिन्न विकल्प हैं। संख्यात्मक सूचकांक यदि कॉलम सूचकांक ज्ञात हैं, तो उन्हें चुनने के लिए ILOC फ़ंक्शन का ...प्रोग्रामिंग 2025-04-13 को पोस्ट किया गया
-
कैसे regex का उपयोग करके PHP में कुशलता से कोष्ठक के भीतर पाठ निकालें] एक दृष्टिकोण PHP के स्ट्रिंग हेरफेर कार्यों का उपयोग करने के लिए है, जैसा कि नीचे प्रदर्शित किया गया है: $ फुलस्ट्रिंग = "इस (पाठ) को छोड़क...प्रोग्रामिंग 2025-04-13 को पोस्ट किया गया
-
गुमनाम जावास्क्रिप्ट इवेंट हैंडलर को साफ -सुथरा कैसे निकालें?] तत्व? तत्व। जब तक हैंडलर का संदर्भ निर्माण में संग्रहीत नहीं किया गया था, तब तक एक गुमनाम इवेंट हैंडलर को साफ करने का कोई तरीका नहीं है। यह आवश्...प्रोग्रामिंग 2025-04-13 को पोस्ट किया गया
-
CSS `सामग्री` प्रॉपर्टी का उपयोग करके फ़ायरफ़ॉक्स चित्र क्यों नहीं है?] यह प्रदान किए गए CSS वर्ग में देखा जा सकता है: । Googlepipic { सामग्री: url ('../../ img/googleplusicon.png'); मार्जिन -टॉप: -6.5%;...प्रोग्रामिंग 2025-04-13 को पोस्ट किया गया
-
मैं सेल एडिटिंग के बाद कस्टम जेटेबल सेल रेंडरिंग कैसे बनाए रख सकता हूं?हालाँकि, यह सुनिश्चित करना महत्वपूर्ण है कि वांछित स्वरूपण को संपादन संचालन के बाद भी संरक्षित किया गया है। इस तरह के परिदृश्यों में, सेल रेंडरर का ड...प्रोग्रामिंग 2025-04-13 को पोस्ट किया गया
-
मैं जावा में निर्देशिका परिवर्तन सहित कमांड प्रॉम्प्ट कमांड को कैसे निष्पादित कर सकता हूं?] यद्यपि आपको कोड स्निपेट मिल सकते हैं जो कमांड प्रॉम्प्ट खोलते हैं, वे अक्सर निर्देशिकाओं को बदलने और अतिरिक्त कमांड को निष्पादित करने की क्षमता में ...प्रोग्रामिंग 2025-04-13 को पोस्ट किया गया
-
फिक्स्ड पोजिशनिंग का उपयोग करते समय 100% ग्रिड-टेम्प्लेट-कॉलम के साथ ग्रिड शरीर से परे क्यों फैलता है?] फिक्स्ड; class = "स्निपेट-कोड"> । माता-पिता { स्थिति: फिक्स्ड; चौड़ाई: 100%; 6fr; lang-html atrayprint-override ">प्रोग्रामिंग 2025-04-13 को पोस्ट किया गया















चीनी भाषा का अध्ययन करें
- 1 आप चीनी भाषा में "चलना" कैसे कहते हैं? #का चीनी उच्चारण, #का चीनी सीखना
- 2 आप चीनी भाषा में "विमान ले लो" कैसे कहते हैं? #का चीनी उच्चारण, #का चीनी सीखना
- 3 आप चीनी भाषा में "ट्रेन ले लो" कैसे कहते हैं? #का चीनी उच्चारण, #का चीनी सीखना
- 4 आप चीनी भाषा में "बस ले लो" कैसे कहते हैं? #का चीनी उच्चारण, #का चीनी सीखना
- 5 चीनी भाषा में ड्राइव को क्या कहते हैं? #का चीनी उच्चारण, #का चीनी सीखना
- 6 तैराकी को चीनी भाषा में क्या कहते हैं? #का चीनी उच्चारण, #का चीनी सीखना
- 7 आप चीनी भाषा में साइकिल चलाने को क्या कहते हैं? #का चीनी उच्चारण, #का चीनी सीखना
- 8 आप चीनी भाषा में नमस्ते कैसे कहते हैं? 你好चीनी उच्चारण, 你好चीनी सीखना
- 9 आप चीनी भाषा में धन्यवाद कैसे कहते हैं? 谢谢चीनी उच्चारण, 谢谢चीनी सीखना
- 10 How to say goodbye in Chinese? 再见Chinese pronunciation, 再见Chinese learning









