
प्रदर्शन जाल: सामान्य पुस्तकालय और सहायक वस्तुएं
 ब्राउज़ करें:825
ब्राउज़ करें:825
सुविधा और प्रदर्शन आम तौर पर विपरीत रूप से सहसंबद्ध होते हैं। यदि कोड का उपयोग करना आसान है, तो यह कम अनुकूलित है। यदि इसे अनुकूलित किया गया है, तो यह कम सुविधाजनक है। कुशल कोड को वास्तव में क्या चल रहा है, कैसे चल रहा है, इसकी विस्तृत जानकारी के करीब पहुंचने की आवश्यकता है।
कैंसर अनुसंधान के लिए डीपसेल सेलुलर सेगमेंटेशन को चलाने और अनुकूलित करने के हमारे चल रहे काम में मुझे एक उदाहरण मिला। डीपसेल एआई मॉडल भविष्यवाणी करता है कि सेल में कौन से पिक्सल के होने की सबसे अधिक संभावना है। वहां से, हम सेल बॉर्डर (कुछ सीमा से नीचे) तक पहुंचने तक, सबसे संभावित पिक्सेल से "बाढ़ भरते" हैं।
इस प्रक्रिया के एक भाग में अनुमानित कोशिकाओं के अंदर छोटे-छोटे अंतरालों को ठीक करना शामिल है, जो विभिन्न कारणों से हो सकता है लेकिन जैविक रूप से संभव नहीं है। (डोनट छेद के बारे में सोचें, कोशिका की छिद्रपूर्ण झिल्ली के बारे में नहीं।)
छेद भरने का एल्गोरिदम इस प्रकार है:
- ऑब्जेक्ट्स की पहचान करें (समान संख्यात्मक आईडी के साथ दिए गए सेल लेबल के साथ सन्निहित पिक्सेल)।
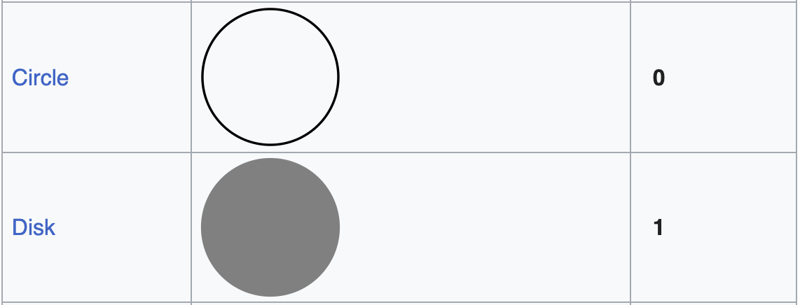
- इन कोशिकाओं की "यूलर संख्या" की गणना करें, जो आकृति की सतह का माप है।
- यदि यूलर संख्या 1 से कम है (अर्थात सतह पर अंतराल है), तो छिद्रों को चिकना कर दें।
यहां विकिपीडिया लेख से यूलर संख्याओं का एक उदाहरण दिया गया है; एक वृत्त (सिर्फ रेखा भाग) में शून्य की यूलर विशेषता होती है जबकि एक डिस्क ("भरा हुआ" वृत्त) का मान 1 होता है।
हालांकि हम यहां यूलर संख्याओं को परिभाषित करने या गणना करने के बारे में बात करने के लिए नहीं हैं। हम इस बारे में बात करेंगे कि कैसे यूलर संख्याओं की गणना करने के लिए लाइब्रेरी का आसान रास्ता काफी अक्षम है।
सबसे पहली बात। स्पीडस्कोप का उपयोग करके इस प्रोफ़ाइल को देखकर हमने समस्या देखी:
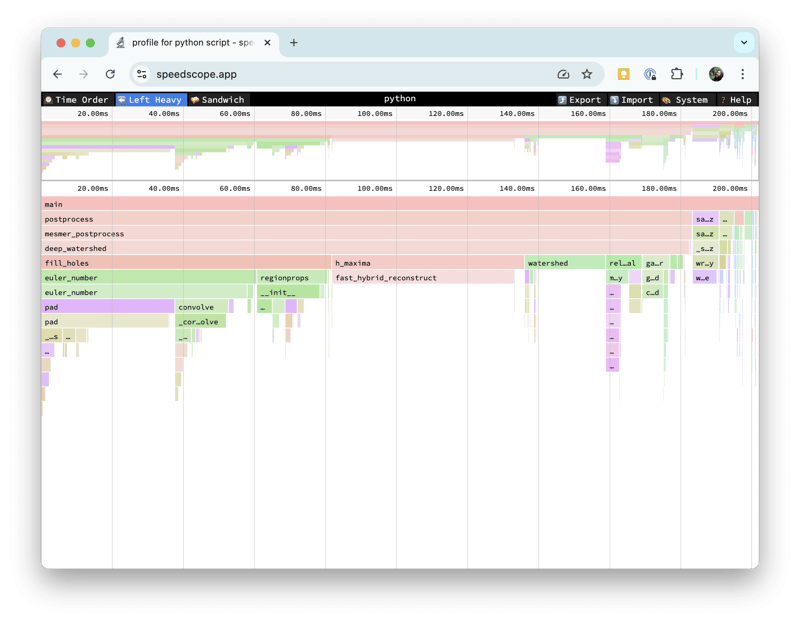
यह रीजनप्रॉप्स में खर्च किए गए ~32 एमएस (~15%) दिखाता है। यह दृश्य बाएँ-भारी है, यदि हम टाइमलाइन दृश्य पर जाते हैं और ज़ूम इन करते हैं, तो हमें यह मिलता है:
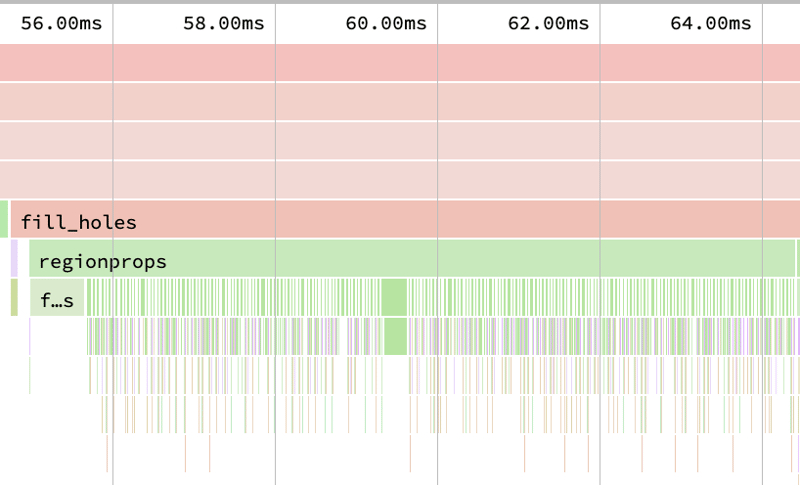
(ध्यान दें कि हम ऐसा दो बार करते हैं, इसलिए यहां ~16 एमएस और अन्यत्र ~16 एमएस, नहीं दिखाया गया है।)
यह तुरंत संदेहास्पद है: find_objects के साथ वस्तुओं को खोजने का "दिलचस्प" हिस्सा वह पहला स्लिवर, 0.5ms है। यह टुपल्स की सूची लौटाता है, जनरेटर नहीं, इसलिए जब यह पूरा हो जाता है तो यह हो जाता है। तो बाकी सभी चीज़ों का क्या हाल है? हम रीजनप्रॉपर्टीज़ ऑब्जेक्ट का निर्माण कर रहे हैं। आइए उनमें से एक पर ज़ूम इन करें।

छोटे स्लिवर्स (जिन्हें हम ज़ूम नहीं करेंगे) कस्टम __setattr__ कॉल हैं: रीजनप्रॉपर्टीज़ ऑब्जेक्ट एलियासिंग का समर्थन करते हैं, उदाहरण के लिए यदि आप विशेषता ConvexArea सेट करते हैं तो यह एक मानक विशेषता एरिया_कॉनवेक्स पर रीडायरेक्ट करता है। भले ही हम उसका उपयोग नहीं कर रहे हैं फिर भी हम विशेषता कनवर्टर के माध्यम से ही चलते हैं।
इसके अलावा: हम क्षेत्र की संपत्तियों में गणना की गई अधिकांश संपत्तियों का उपयोग भी नहीं कर रहे हैं। हमें केवल यूलर संख्या की परवाह है:
props = regionprops(np.squeeze(label_img.astype('int')), cache=False)
for prop in props:
if prop.euler_number
बदले में, यह केवल क्षेत्र गुणों के सबसे बुनियादी पहलू का उपयोग करता है: find_objects (मूल छवि के स्लाइस) द्वारा पता लगाए गए छवि क्षेत्र।
इसलिए, हमने रीजनप्रॉप्स सामान्य प्रयोजन फ़ंक्शन को बायपास करने के लिए कोड को fill_holes कोड में बदल दिया। इसके बजाय, हम find_objects को कॉल करते हैं और परिणामी छवि उप-क्षेत्रों को euler_number फ़ंक्शन में पास करते हैं (RegionProperties ऑब्जेक्ट पर विधि नहीं)।
यहां पुल अनुरोध है: डीपसेल-इमेजिंग#358 रीजनप्रॉप्स निर्माण छोड़ें
मध्यवर्ती ऑब्जेक्ट को छोड़ कर, हमें fill_holes ऑपरेशन के लिए एक अच्छा प्रदर्शन सुधार मिला:
छवि का आकार
पहले
बाद में
गति बढ़ाना
260k पिक्सेल
48 एमएस
40 एमएस
8 एमएस (17%)
140M पिक्सेल
15.6s
11.7s
3.9 सेकंड (25%)
बड़ी छवि के लिए, 4एस कुल रनटाइम का ~3% है - इसका बड़ा हिस्सा नहीं, लेकिन बहुत जर्जर भी नहीं।
-
 Chatbot कमांड निष्पादन के लिए वास्तविक समय में कैसे कैप्चर और स्ट्रीम करें?] हालाँकि, वास्तविक समय में स्टडआउट को पुनः प्राप्त करने का प्रयास करते समय चुनौतियां उत्पन्न होती हैं। इसे दूर करने के लिए, हमें स्क्रिप्ट के निष्पाद...प्रोग्रामिंग 2025-07-15 को पोस्ट किया गया
Chatbot कमांड निष्पादन के लिए वास्तविक समय में कैसे कैप्चर और स्ट्रीम करें?] हालाँकि, वास्तविक समय में स्टडआउट को पुनः प्राप्त करने का प्रयास करते समय चुनौतियां उत्पन्न होती हैं। इसे दूर करने के लिए, हमें स्क्रिप्ट के निष्पाद...प्रोग्रामिंग 2025-07-15 को पोस्ट किया गया -
सरणी] एरेज़ ऑब्जेक्ट हैं, इसलिए उनके पास जेएस में भी तरीके हैं। स्लाइस (शुरुआत): मूल सरणी को म्यूट किए बिना, एक नए सरणी में सरणी का हिस्सा निकाले...प्रोग्रामिंग 2025-07-15 को पोस्ट किया गया
-
PHP में खाली सरणियों का कुशलता से कैसे पता लगाएं?] यदि आवश्यकता किसी भी सरणी तत्व की उपस्थिति को सत्यापित करने की है, तो PHP की ढीली टाइपिंग सरणी के प्रत्यक्ष मूल्यांकन के लिए ही अनुमति देती है: अग...प्रोग्रामिंग 2025-07-15 को पोस्ट किया गया
-
Visual Studio 2012 में DataSource संवाद में MySQL डेटाबेस कैसे जोड़ें?] यह लेख इस समस्या को संबोधित करता है और एक समाधान प्रदान करता है। इसे हल करने के लिए, यह समझना महत्वपूर्ण है कि MySQL के लिए आधिकारिक विजुअल स्टूडियो...प्रोग्रामिंग 2025-07-15 को पोस्ट किया गया
-
मैक्स काउंट को ढूंढते समय MySQL में समूह फ़ंक्शन \ "त्रुटि के \" अमान्य उपयोग को कैसे हल करें?] नाम से EMP1 समूह से अधिकतम (गिनती (*)) का चयन करें; त्रुटि 1111 (Hy000): समूह फ़ंक्शन का अमान्य उपयोग त्रुटि को समझना त्रुटि पैदा हो जाती है...प्रोग्रामिंग 2025-07-15 को पोस्ट किया गया
-
मैं माउस क्लिक पर एक DIV के भीतर सभी पाठ का चयन कैसे कर सकता हूं?] This allows users to easily drag and drop the selected text or copy it directly.SolutionTo select the text within a DIV element on a single mouse cl...प्रोग्रामिंग 2025-07-15 को पोस्ट किया गया
-
कैसे ठीक करें "सामान्य त्रुटि: 2006 MySQL सर्वर डेटा डालते समय दूर चला गया है?] यह त्रुटि तब होती है जब सर्वर का कनेक्शन खो जाता है, आमतौर पर MySQL कॉन्फ़िगरेशन में दो चर में से एक के कारण। ये चर उस अधिकतम समय को नियंत्रित करते ...प्रोग्रामिंग 2025-07-15 को पोस्ट किया गया
-
मैं सेल एडिटिंग के बाद कस्टम जेटेबल सेल रेंडरिंग कैसे बनाए रख सकता हूं?हालाँकि, यह सुनिश्चित करना महत्वपूर्ण है कि वांछित स्वरूपण को संपादन संचालन के बाद भी संरक्षित किया गया है। इस तरह के परिदृश्यों में, सेल रेंडरर का ड...प्रोग्रामिंग 2025-07-15 को पोस्ट किया गया
-
जावा स्ट्रिंग्स के लिए प्रभावी चेकिंग विधि जो गैर-खाली और गैर-नल हैं1.6 और बाद में, isempty () विधि शून्यता के लिए जांच करने के लिए एक संक्षिप्त तरीका प्रदान करती है: अगर (str! = Null &&! Str.isempty ()) उपयोग: ...प्रोग्रामिंग 2025-07-15 को पोस्ट किया गया
-
अनियंत्रित संग्रह में ट्यूपल्स के लिए एक सामान्य हैश फ़ंक्शन को कैसे लागू करें?] हालांकि, कस्टम हैश फ़ंक्शन को परिभाषित किए बिना इन संग्रहों में कुंजी के रूप में टुपल्स का उपयोग करने से अप्रत्याशित व्यवहार हो सकता है। इसे ठीक क...प्रोग्रामिंग 2025-07-15 को पोस्ट किया गया
-
MySQLI पर स्विच करने के बाद MySQL डेटाबेस से कनेक्ट करने के लिए CodeIgniter के कारण] यह त्रुटि गलत PHP कॉन्फ़िगरेशन से उत्पन्न हो सकती है। समस्या को डिबग करने के लिए, यह फ़ाइल के अंत में निम्न कोड जोड़ने के लिए अनुशंसित है ।/config...प्रोग्रामिंग 2025-07-15 को पोस्ट किया गया
-
पीडीओ मापदंडों के साथ क्वेरी की तरह सही तरीके से उपयोग कैसे करें?$ params = सरणी ($ var1, $ var2); $ stmt = $ हैंडल-> तैयार करें ($ क्वेरी); $ stmt-> निष्पादित ($ params); त्रुटि % संकेतों के गलत समावेश में निहित ह...प्रोग्रामिंग 2025-07-15 को पोस्ट किया गया
-
C ++ में फ़ंक्शन या कंस्ट्रक्टर मापदंडों के रूप में अनन्य पॉइंटर्स कैसे पास करें?] निहितार्थ। : अगला (std :: Move (n)) {} यह विधि फ़ंक्शन/ऑब्जेक्ट के लिए अद्वितीय सूचक के स्वामित्व को स्थानांतरित करती है। पॉइंटर की सामग्री को फ...प्रोग्रामिंग 2025-07-15 को पोस्ट किया गया
-
पायथन में चर मानों का पता लगाने के लिए "अगर" के बजाय "कोशिश" का उपयोग करें?] यह दुविधा "अगर" या "कोशिश" का उपयोग करने के बीच निर्णय लेने के बीच उत्पन्न होती है। आपके उदाहरण में, एक "यदि" निर्माण ...प्रोग्रामिंग 2025-07-15 को पोस्ट किया गया
-
संकलक त्रुटि "USR/BIN/LD: नहीं मिल सकती है -L" समाधान] -l यह त्रुटि इंगित करती है कि लिंकर आपके निष्पादन योग्य को जोड़ते समय निर्दिष्ट लाइब्रेरी का पता नहीं लगा सकता है। इस समस्या को हल करने के लिए, ह...प्रोग्रामिंग 2025-07-15 को पोस्ट किया गया















चीनी भाषा का अध्ययन करें
- 1 आप चीनी भाषा में "चलना" कैसे कहते हैं? #का चीनी उच्चारण, #का चीनी सीखना
- 2 आप चीनी भाषा में "विमान ले लो" कैसे कहते हैं? #का चीनी उच्चारण, #का चीनी सीखना
- 3 आप चीनी भाषा में "ट्रेन ले लो" कैसे कहते हैं? #का चीनी उच्चारण, #का चीनी सीखना
- 4 आप चीनी भाषा में "बस ले लो" कैसे कहते हैं? #का चीनी उच्चारण, #का चीनी सीखना
- 5 चीनी भाषा में ड्राइव को क्या कहते हैं? #का चीनी उच्चारण, #का चीनी सीखना
- 6 तैराकी को चीनी भाषा में क्या कहते हैं? #का चीनी उच्चारण, #का चीनी सीखना
- 7 आप चीनी भाषा में साइकिल चलाने को क्या कहते हैं? #का चीनी उच्चारण, #का चीनी सीखना
- 8 आप चीनी भाषा में नमस्ते कैसे कहते हैं? 你好चीनी उच्चारण, 你好चीनी सीखना
- 9 आप चीनी भाषा में धन्यवाद कैसे कहते हैं? 谢谢चीनी उच्चारण, 谢谢चीनी सीखना
- 10 How to say goodbye in Chinese? 再见Chinese pronunciation, 再见Chinese learning









