 Titelseite > Programmierung > Das nächstliegende Punktepaar mithilfe des Divide-and-Conquer-Prinzips finden
Titelseite > Programmierung > Das nächstliegende Punktepaar mithilfe des Divide-and-Conquer-Prinzips finden
Das nächstliegende Punktepaar mithilfe des Divide-and-Conquer-Prinzips finden
 Durchsuche:115
Durchsuche:115
In diesem Abschnitt werden effiziente Algorithmen zum Finden des nächstgelegenen Punktpaars mithilfe der Divide-and-Conquer-Methode vorgestellt. Bei einer gegebenen Menge von Punkten besteht das Problem des engsten Paares darin, die beiden Punkte zu finden, die einander am nächsten liegen. Wie in der Abbildung unten gezeigt, wird eine Linie gezeichnet, um die beiden nächstgelegenen Punkte in der Animation des nächsten Paares zu verbinden.
Fallstudie: Das nächstliegende Paar finden, stellte einen Brute-Force-Algorithmus zum Finden des nächstliegenden Punktepaars vor. Der Algorithmus berechnet die Abstände zwischen allen Punktpaaren und findet dasjenige mit dem minimalen Abstand. Offensichtlich benötigt der Algorithmus O(n^2) Zeit. Können wir einen effizienteren Algorithmus entwerfen?
Wir werden einen Ansatz namens Teile und herrsche verwenden, um dieses Problem zu lösen. Der Ansatz unterteilt das Problem in Teilprobleme, löst die Teilprobleme und kombiniert dann die Lösungen der Teilprobleme, um die Lösung für das gesamte Problem zu erhalten. Im Gegensatz zum dynamischen Programmieransatz überschneiden sich die Teilprobleme beim Divide-and-Conquer-Ansatz nicht. Ein Teilproblem ähnelt dem ursprünglichen Problem, hat jedoch eine kleinere Größe, sodass Sie zur Lösung des Problems eine Rekursion anwenden können. Tatsächlich folgen alle Lösungen für rekursive Probleme dem Divide-and-Conquer-Ansatz.
Die folgenden Schritte beschreiben, wie Sie das Problem des nächsten Paares mithilfe des Divide-and-Conquer-Ansatzes lösen.
- Schritt 1: Sortieren Sie die Punkte in aufsteigender Reihenfolge der x-Koordinaten. Sortieren Sie die Punkte mit denselben X-Koordinaten nach Y-Koordinaten. Dies führt zu einer sortierten Liste S von Punkten.
- Schritt 2: Teilen Sie S in zwei Teilmengen, S1 und S2, gleicher Größe auf, indem Sie den Mittelpunkt in der sortierten Liste verwenden. Der Mittelpunkt sei in S1. Finden Sie rekursiv das nächste Paar in S1 und S2. d1 und d2 bezeichnen jeweils den Abstand der nächsten Paare in den beiden Teilmengen.
- Schritt 3: Finden Sie das nächstgelegene Paar zwischen einem Punkt in S1 und einem Punkt in S2 und bezeichnen Sie deren Abstand als d3. Das nächste Paar ist das mit dem Abstand min(d1, d2, d3).
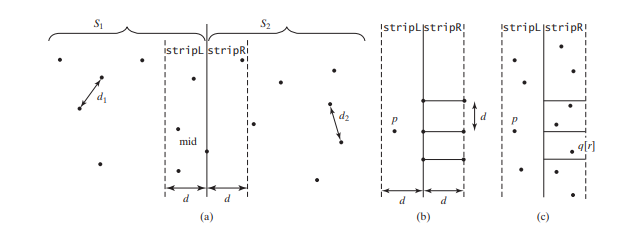
Die Auswahlsortierung benötigt O(n^2) Zeit. Schritt 1 kann in O(n log n) Zeit durchgeführt werden. Schritt 3 kann in O(n)-Zeit durchgeführt werden. Sei d = min(d1, d2). Wir wissen bereits, dass der Abstand des nächsten Paars nicht größer als d sein kann. Damit ein Punkt in S1 und ein Punkt in S2 das nächste Paar in S bilden, muss der linke Punkt in stripL und der rechte Punkt in stripR liegen, wie in der Abbildung unten dargestellt ( A).
Für einen Punkt p in stripL müssen Sie nur einen rechten Punkt innerhalb des d X 2d-Rechtecks berücksichtigen, wie unten (b) gezeigt. Jeder rechte Punkt außerhalb des Rechtecks kann nicht das nächstliegende Paar mit p bilden. Da der Abstand des nächsten Paares in S2 größer oder gleich d ist, kann es höchstens sechs geben
Punkte im Rechteck. Somit müssen für jeden Punkt in stripL höchstens sechs Punkte in stripR berücksichtigt werden.
Wie lokalisieren Sie für jeden Punkt p in stripL die Punkte im entsprechenden d X 2d-Rechteckbereich in stripR? Dies kann effizient durchgeführt werden, wenn die Punkte in stripL und stripR in aufsteigender Reihenfolge ihrer y-Koordinaten sortiert werden. Sei pointsOrderedOnY die Liste der Punkte, sortiert in aufsteigender Reihenfolge der y-Koordinaten. pointsOrderedOnY kann vorher im Algorithmus abgerufen werden. stripL und stripR können von pointsOrderedOnY in Schritt 3 abgerufen werden, wie im folgenden Code gezeigt.
für jeden Punkt p in pointsOrderedOnY
if (p ist in S1 und mid.x – p.x
p an StripL anhängen;
sonst wenn (p ist in S2 und p.x - mid.x
p an StripR anhängen;
Die Punkte in stripL und stripR seien {p0, p1, ... , pk} und {q0, q1, ... , qt}, wie in gezeigt Abbildung oben (c). Das nächstgelegene Paar zwischen einem Punkt in stripL und einem Punkt in stripR kann mithilfe des im folgenden Code beschriebenen Algorithmus gefunden werden.
d = min(d1, d2);
r = 0; // r is the index of a point in stripR
for (each point p in stripL) {
// Skip the points in stripR below p.y - d
while (r
Die Punkte in stripL werden ab p0, p1, ..., pk in dieser Reihenfolge berücksichtigt. Überspringen Sie für einen Punkt p in stripL die Punkte in stripR, die unter p.y – d liegen (Zeilen 5–6). Sobald ein Punkt übersprungen wird, wird er nicht mehr berücksichtigt. Die while-Schleife (Zeilen 9–17) prüft, ob (p, q[r1]) ein mögliches nächstliegendes Paar ist. Es gibt höchstens sechs solcher q[r1]-Paare, da der Abstand zwischen zwei Punkten in stripR nicht kleiner als d sein kann. Die Komplexität zum Finden des nächsten Paares in Schritt 3 beträgt also O(n).
Beachten Sie, dass Schritt 1 in den obigen Schritten nur einmal ausgeführt wird, um die Punkte vorzusortieren. Gehen Sie davon aus, dass alle Punkte vorsortiert sind. T(n) bezeichne die Zeitkomplexität für diesen Algorithmus. Daher,

Daher kann das nächstgelegene Punktpaar in O(n log n) Zeit gefunden werden.
-
 Wie kann ich Kompilierungsoptimierungen im Go -Compiler anpassen?Anpassung von Kompilierungsoptimierungen in Go Compiler Der Standardkompilierungsprozess in Go folgt einer spezifischen Optimierungsstrategie....Programmierung Gepostet am 2025-04-02
Wie kann ich Kompilierungsoptimierungen im Go -Compiler anpassen?Anpassung von Kompilierungsoptimierungen in Go Compiler Der Standardkompilierungsprozess in Go folgt einer spezifischen Optimierungsstrategie....Programmierung Gepostet am 2025-04-02 -
Wie kann ich mehrere SQL-Anweisungen in einer einzelnen Abfrage mit Node-Mysql ausführen?Multi-Statement-Abfrageunterstützung in node-mysql In Node.js entstehen die Frage, wenn mehrere SQL-Anweisungen in einem einzigen Abfragelemen...Programmierung Gepostet am 2025-04-02
-
Wie kann ich nach der Bearbeitung von Zellen eine kundenspezifische JTable -Zell -Rendering beibehalten?beibehalten von jtable cell rendering nach cell edit in einem jtable, in dem benutzerdefinierte Zellenwiedergabe implementiert werden, kann di...Programmierung Gepostet am 2025-04-02
-
Wie kombinieren Sie Daten aus drei MySQL -Tabellen zu einer neuen Tabelle?mySql: Erstellen einer neuen Tabelle aus Daten und Spalten von drei Tabellen Frage: Wie können ich eine neue Tabelle erstellen. Aus den Pe...Programmierung Gepostet am 2025-04-02
-
Wie zeige ich das aktuelle Datum und die aktuelle Uhrzeit in "DD/MM/JJJJ HH: MM: SS.SS" -Format in Java richtig?wie man aktuelles Datum und Uhrzeit in "dd/mm/yyyy hh: mm: ss.ss" Format in dem vorgesehenen Java -Code, das Problem mit der Anzeige...Programmierung Gepostet am 2025-04-02
-
Wie kann ich Werte von zwei gleichen Arrays in PHP synchron iterieren und drucken?synchron iterierend und drucken Werte aus zwei Arrays derselben Größe beim Erstellen einer Selectbox unter Verwendung von zwei Arrays gleicher G...Programmierung Gepostet am 2025-04-02
-
Wie extrahieren Sie ein zufälliges Element aus einem Array in PHP?zufällige Auswahl aus einem Array In PHP kann ein zufälliger Element aus einem Array mit Leichtigkeit erreicht werden. Betrachten Sie das folgen...Programmierung Gepostet am 2025-04-02
-
Wie entferte ich anonyme JavaScript -Ereignishandler sauber?entfernen anonymer Ereignis -Hörer Hinzufügen von anonymen Ereignishörern zu Elementen bieten Flexibilität und Einfachheit, aber wenn es Zeit is...Programmierung Gepostet am 2025-04-02
-
Wie behandle ich den Benutzereingang im exklusiven Modus von Java von Java?verwandeln Benutzereingaben im Vollbildmodus in java Einführung Wenn eine Java -Anwendung im Vollbildmodus exklusiver Modus ausgeführt wird,...Programmierung Gepostet am 2025-04-02
-
Wie kann ich mehrere Benutzertypen (Schüler, Lehrer und Administratoren) in ihre jeweiligen Aktivitäten in einer Firebase -App umleiten?rot: Wie man mehrere Benutzertypen zu jeweiligen Aktivitäten umleitet Login. Der aktuelle Code verwaltet die Umleitung für zwei Benutzertypen erf...Programmierung Gepostet am 2025-04-02
-
Wie kann ich programmgesteuert den gesamten Text in einer DIV auf Mausklick auswählen?programmatisch den Div -Text in Maus auswählen klicken Frage angegeben ein DIV -Element mit Textinhalten, wie kann der Benutzer programmatisch...Programmierung Gepostet am 2025-04-02
-
Wie kann ich mit dem Python -Verständnis Wörterbücher effizient erstellen?Python Dictionary Verständnis In Python bieten Dictionary -Verständnisse eine kurze Möglichkeit, neue Wörterbücher zu generieren. Während sie de...Programmierung Gepostet am 2025-04-02
-
Wie füge ich Blobs (Bilder) mithilfe von PHP richtig in MySQL ein?Fügen Sie Blobs in mySQL -Datenbanken mit php beim Versuch, ein Bild in einer MySQL -Datenbank zu speichern, auf eine auf ein Bild zu speiche...Programmierung Gepostet am 2025-04-02
-
Wie benutze ich wie Abfragen mit PDO -Parametern richtig?verwenden wie Abfragen in pdo beim Versuch, wie Abfragen in PDO zu implementieren, können Sie Probleme wie die in der Abfrage unten beschriebe...Programmierung Gepostet am 2025-04-02
-
Welche Methode zur Deklarierung mehrerer Variablen in JavaScript ist besser gewartet?deklarieren mehrere Variablen in JavaScript: Erforschung von zwei Methoden In JavaScript begegnen Entwickler häufig die Notwendigkeit, mehrere...Programmierung Gepostet am 2025-04-02















Chinesisch lernen
- 1 Wie sagt man „gehen“ auf Chinesisch? 走路 Chinesische Aussprache, 走路 Chinesisch lernen
- 2 Wie sagt man auf Chinesisch „Flugzeug nehmen“? 坐飞机 Chinesische Aussprache, 坐飞机 Chinesisch lernen
- 3 Wie sagt man auf Chinesisch „einen Zug nehmen“? 坐火车 Chinesische Aussprache, 坐火车 Chinesisch lernen
- 4 Wie sagt man auf Chinesisch „Bus nehmen“? 坐车 Chinesische Aussprache, 坐车 Chinesisch lernen
- 5 Wie sagt man „Fahren“ auf Chinesisch? 开车 Chinesische Aussprache, 开车 Chinesisch lernen
- 6 Wie sagt man Schwimmen auf Chinesisch? 游泳 Chinesische Aussprache, 游泳 Chinesisch lernen
- 7 Wie sagt man auf Chinesisch „Fahrrad fahren“? 骑自行车 Chinesische Aussprache, 骑自行车 Chinesisch lernen
- 8 Wie sagt man auf Chinesisch Hallo? 你好Chinesische Aussprache, 你好Chinesisch lernen
- 9 Wie sagt man „Danke“ auf Chinesisch? 谢谢Chinesische Aussprache, 谢谢Chinesisch lernen
- 10 How to say goodbye in Chinese? 再见Chinese pronunciation, 再见Chinese learning









