 Front page > Programming > Mastering Image Segmentation: How Traditional Techniques Still Shine in the Digital Age
Front page > Programming > Mastering Image Segmentation: How Traditional Techniques Still Shine in the Digital Age
Mastering Image Segmentation: How Traditional Techniques Still Shine in the Digital Age
 Browse:676
Browse:676
Introduction
Image segmentation, one of the most basic procedures in computer vision, allows a system to decompose and analyze various regions within an image. Whether you're dealing with object recognition, medical imaging, or autonomous driving, segmentation is what breaks images down into meaningful parts.
Although deep learning models continue to be increasingly popular in this task, traditional techniques in digital image processing still are powerful and practical. The approaches being reviewed in this post include thresholding, edge detection, region-based, and clustering by implementing a well-recognized dataset for the analysis of cell images, the MIVIA HEp-2 Image Dataset.
MIVIA HEp-2 Image Dataset
The MIVIA HEp-2 Image Dataset is a set of pictures of the cells used to analyze the pattern of antinuclear antibodies (ANA) through HEp-2 cells. It consists of 2D pictures taken through fluorescence microscopy. This makes it very suitable for segmentation tasks, most importantly those concerned with medical image analysis, where cellular region detection is most important.
Now, let's move on to the segmentation techniques used to process these images, comparing their performance based on the F1 scores.
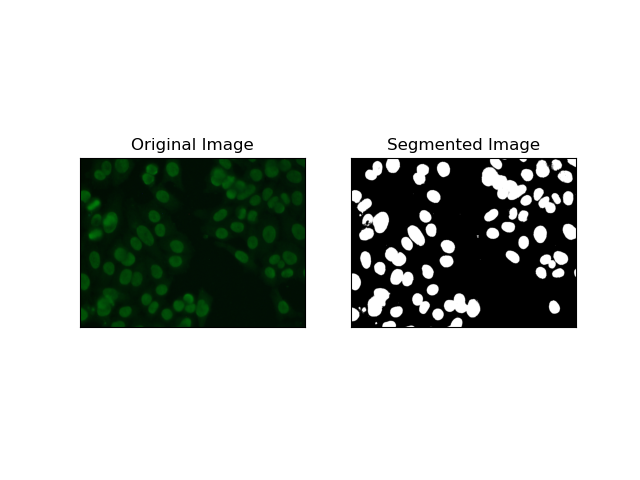
1. Thresholding Segmentation
Thresholding is the process whereby grayscale images get converted into binary images based on pixel intensities. In the MIVIA HEp-2 dataset, this process is useful in cell extraction from the background. It is simple and effective to a relatively large level, especially with Otsu's method, as it self-computes the optimum threshold.
Otsu's Method is an automatic thresholding method, where it tries to find the best threshold value to yield the minimal intra-class variance, thereby separating the two classes: foreground (cells) and background. The method examines the image histogram and computes the perfect threshold, where the sum of the pixel intensity variances in each class is minimized.
# Thresholding Segmentation
def thresholding(img):
# Convert image to grayscale
gray = cv.cvtColor(img, cv.COLOR_BGR2GRAY)
# Apply Otsu's thresholding
_, thresh = cv.threshold(gray, 0, 255, cv.THRESH_BINARY cv.THRESH_OTSU)
return thresh
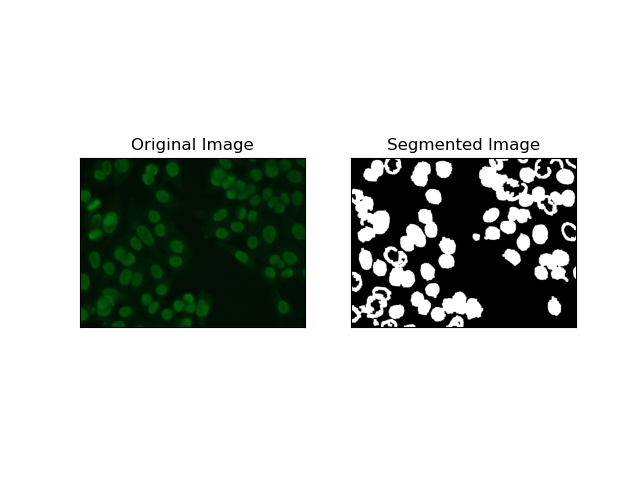
2. Edge Detection Segmentation
Edge detection pertains to identifying boundaries of objects or regions, such as cell edges in the MIVIA HEp-2 dataset. Of the many available methods for detecting abrupt intensity changes, the Canny Edge Detector is the best and hence most appropriate method to be used for detecting cellular boundaries.
Canny Edge Detector is a multi-stage algorithm that can detect the edges by detecting areas of strong gradients of intensity. The process embodies smoothing with a Gaussian filter, calculation of intensity gradients, application of non-maximum suppression to eliminate spurious responses, and a final double thresholding operation for the retention of only salient edges.
# Edge Detection Segmentation
def edge_detection(img):
# Convert image to grayscale
gray = cv.cvtColor(img, cv.COLOR_BGR2GRAY)
# Apply Gaussian blur
gray = cv.GaussianBlur(gray, (3, 3), 0)
# Calculate lower and upper thresholds for Canny edge detection
sigma = 0.33
v = np.median(gray)
lower = int(max(0, (1.0 - sigma) * v))
upper = int(min(255, (1.0 sigma) * v))
# Apply Canny edge detection
edges = cv.Canny(gray, lower, upper)
# Dilate the edges to fill gaps
kernel = np.ones((5, 5), np.uint8)
dilated_edges = cv.dilate(edges, kernel, iterations=2)
# Clean the edges using morphological opening
cleaned_edges = cv.morphologyEx(dilated_edges, cv.MORPH_OPEN, kernel, iterations=1)
# Find connected components and filter out small components
num_labels, labels, stats, _ = cv.connectedComponentsWithStats(
cleaned_edges, connectivity=8
)
min_size = 500
filtered_mask = np.zeros_like(cleaned_edges)
for i in range(1, num_labels):
if stats[i, cv.CC_STAT_AREA] >= min_size:
filtered_mask[labels == i] = 255
# Find contours of the filtered mask
contours, _ = cv.findContours(
filtered_mask, cv.RETR_EXTERNAL, cv.CHAIN_APPROX_SIMPLE
)
# Create a filled mask using the contours
filled_mask = np.zeros_like(gray)
cv.drawContours(filled_mask, contours, -1, (255), thickness=cv.FILLED)
# Perform morphological closing to fill holes
final_filled_image = cv.morphologyEx(
filled_mask, cv.MORPH_CLOSE, kernel, iterations=2
)
# Dilate the final filled image to smooth the edges
final_filled_image = cv.dilate(final_filled_image, kernel, iterations=1)
return final_filled_image
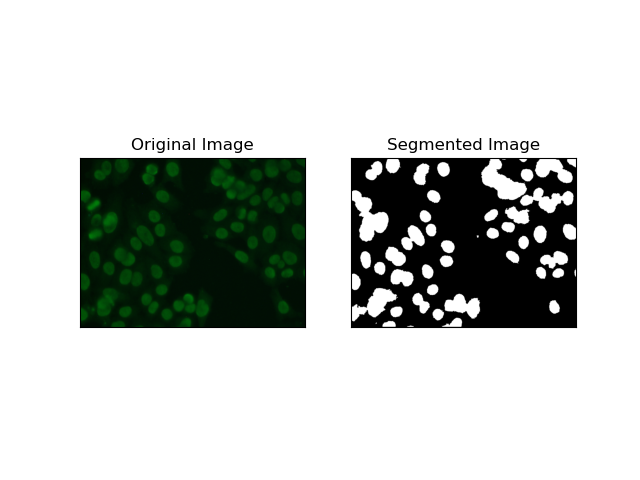
3. Region-Based Segmentation
Region-based segmentation groups similar pixels together into regions, dependent on certain criteria such as intensity or color. The Watershed segmentation technique can be used to help in segmenting HEp-2 cell images to be able to detect those regions that represent cells; it considers pixel intensities as a topographic surface and outlines distinguishing regions.
Watershed segmentation treats the intensities of pixels as a topographical surface. The algorithm identifies "basins" in which it identifies local minima and then gradually floods these basins to enlarge distinct regions. This technique is quite useful when one wants to separate touching objects, like in the case of cells within microscopic images, but it can be sensitive to noise. The process can be guided by markers and over-segmentation can often be reduced.
# Region-Based Segmentation
def region_based(img):
# Convert image to grayscale
gray = cv.cvtColor(img, cv.COLOR_BGR2GRAY)
# Apply Otsu's thresholding
_, thresh = cv.threshold(gray, 0, 255, cv.THRESH_BINARY_INV cv.THRESH_OTSU)
# Apply morphological opening to remove noise
kernel = np.ones((3, 3), np.uint8)
opening = cv.morphologyEx(thresh, cv.MORPH_OPEN, kernel, iterations=2)
# Dilate the opening to get the background
sure_bg = cv.dilate(opening, kernel, iterations=3)
# Calculate the distance transform
dist_transform = cv.distanceTransform(opening, cv.DIST_L2, 5)
# Threshold the distance transform to get the foreground
_, sure_fg = cv.threshold(dist_transform, 0.2 * dist_transform.max(), 255, 0)
sure_fg = np.uint8(sure_fg)
# Find the unknown region
unknown = cv.subtract(sure_bg, sure_fg)
# Label the markers for watershed algorithm
_, markers = cv.connectedComponents(sure_fg)
markers = markers 1
markers[unknown == 255] = 0
# Apply watershed algorithm
markers = cv.watershed(img, markers)
# Create a mask for the segmented region
mask = np.zeros_like(gray, dtype=np.uint8)
mask[markers == 1] = 255
return mask
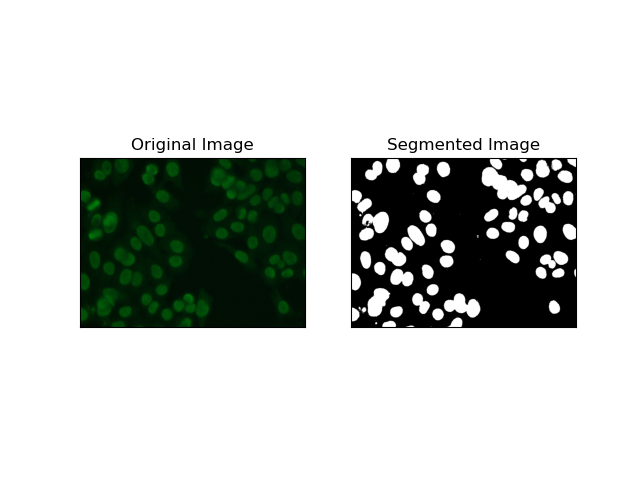
4. Clustering-Based Segmentation
Clustering techniques such as K-Means tend to group the pixels into similar clusters, which works fine when wanting to segment cells in multi-colored or complex environments, as seen in HEp-2 cell images. Fundamentally, this could represent different classes, such as a cellular region versus a background.
K-means is an unsupervised learning algorithm for clustering images based on the pixel similarity of color or intensity. The algorithm randomly selects K centroids, assigns each pixel to the nearest centroid, and updates the centroid iteratively until it converges. It is particularly effective in segmenting an image that has multiple regions of interest that are very different from one another.
# Clustering Segmentation
def clustering(img):
# Convert image to grayscale
gray = cv.cvtColor(img, cv.COLOR_BGR2GRAY)
# Reshape the image
Z = gray.reshape((-1, 3))
Z = np.float32(Z)
# Define the criteria for k-means clustering
criteria = (cv.TERM_CRITERIA_EPS cv.TERM_CRITERIA_MAX_ITER, 10, 1.0)
# Set the number of clusters
K = 2
# Perform k-means clustering
_, label, center = cv.kmeans(Z, K, None, criteria, 10, cv.KMEANS_RANDOM_CENTERS)
# Convert the center values to uint8
center = np.uint8(center)
# Reshape the result
res = center[label.flatten()]
res = res.reshape((gray.shape))
# Apply thresholding to the result
_, res = cv.threshold(res, 0, 255, cv.THRESH_BINARY cv.THRESH_OTSU)
return res
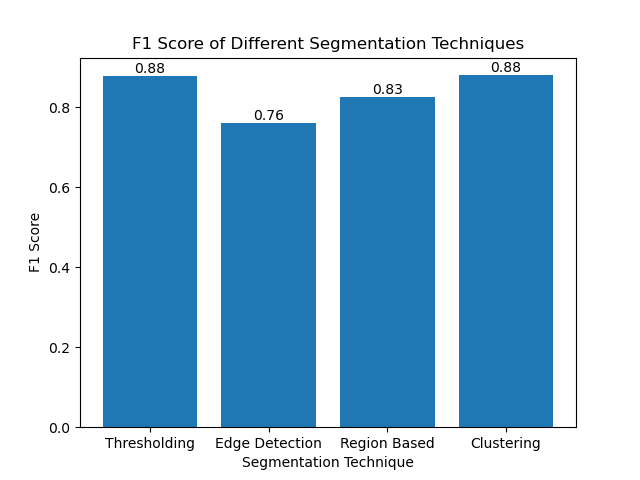
Evaluating the Techniques Using F1 Scores
The F1 score is a measure that combines precision and recall together to compare the predicted segmentation image with the ground truth image. It is the harmonic mean of precision and recall, which is useful in cases of high data imbalance, such as in medical imaging datasets.
We calculated the F1 score for each segmentation method by flattening both the ground truth and the segmented image and calculating the weighted F1 score.
def calculate_f1_score(ground_image, segmented_image):
ground_image = ground_image.flatten()
segmented_image = segmented_image.flatten()
return f1_score(ground_image, segmented_image, average="weighted")
We then visualized the F1 scores of different methods using a simple bar chart:
Conclusion
Although many recent approaches for image segmentation are emerging, traditional segmentation techniques such as thresholding, edge detection, region-based methods, and clustering can be very useful when applied to datasets such as the MIVIA HEp-2 image dataset.
Each method has its strength:
- Thresholding is good for simple binary segmentation.
- Edge Detection is an ideal technique for the detection of boundaries.
- Region-based segmentation is very useful in separating connected components from their neighbors.
- Clustering methods are well-suited for multi-region segmentation tasks.
By evaluating these methods using F1 scores, we understand the trade-offs each of these models has. These methods may not be as sophisticated as what is developed in the newest models of deep learning, but they are still fast, interpretable, and serviceable in a broad range of applications.
Thanks for reading! I hope this exploration of traditional image segmentation techniques inspires your next project. Feel free to share your thoughts and experiences in the comments below!
-
 How to Handle User Input in Java's Full-Screen Exclusive Mode?Handling User Input in Full Screen Exclusive Mode in JavaIntroductionWhen running a Java application in full screen exclusive mode, the usual event ha...Programming Posted on 2025-04-06
How to Handle User Input in Java's Full-Screen Exclusive Mode?Handling User Input in Full Screen Exclusive Mode in JavaIntroductionWhen running a Java application in full screen exclusive mode, the usual event ha...Programming Posted on 2025-04-06 -
How Can I Maintain Custom JTable Cell Rendering After Cell Editing?Maintaining JTable Cell Rendering After Cell EditIn a JTable, implementing custom cell rendering and editing capabilities can enhance the user experie...Programming Posted on 2025-04-06
-
How to Capture and Stream stdout in Real Time for Chatbot Command Execution?Capturing stdout in Real Time from Command ExecutionIn the realm of developing chatbots capable of executing commands, a common requirement is the abi...Programming Posted on 2025-04-06
-
How Do I Efficiently Select Columns in Pandas DataFrames?Selecting Columns in Pandas DataframesWhen dealing with data manipulation tasks, selecting specific columns becomes necessary. In Pandas, there are va...Programming Posted on 2025-04-06
-
How to Efficiently Convert Timezones in PHP?Efficient Timezone Conversion in PHPIn PHP, handling timezones can be a straightforward task. This guide will provide an easy-to-implement method for ...Programming Posted on 2025-04-06
-
Which Method for Declaring Multiple Variables in JavaScript is More Maintainable?Declaring Multiple Variables in JavaScript: Exploring Two MethodsIn JavaScript, developers often encounter the need to declare multiple variables. Two...Programming Posted on 2025-04-06
-
How to Simplify JSON Parsing in PHP for Multi-Dimensional Arrays?Parsing JSON with PHPTrying to parse JSON data in PHP can be challenging, especially when dealing with multi-dimensional arrays. To simplify the proce...Programming Posted on 2025-04-06
-
How Can I Execute Multiple SQL Statements in a Single Query Using Node-MySQL?Multi-Statement Query Support in Node-MySQLIn Node.js, the question arises when executing multiple SQL statements in a single query using the node-mys...Programming Posted on 2025-04-06
-
Why Doesn't `body { margin: 0; }` Always Remove Top Margin in CSS?Addressing Body Margin Removal in CSSFor novice web developers, removing the margin of the body element can be a confusing task. Often, the code provi...Programming Posted on 2025-04-06
-
How to Correctly Display the Current Date and Time in "dd/MM/yyyy HH:mm:ss.SS" Format in Java?How to Display Current Date and Time in "dd/MM/yyyy HH:mm:ss.SS" FormatIn the provided Java code, the issue with displaying the date and tim...Programming Posted on 2025-04-06
-
How to Resolve \"Refused to Load Script...\" Errors Due to Android\'s Content Security Policy?Unveiling the Mystery: Content Security Policy Directive ErrorsEncountering the enigmatic error "Refused to load the script..." when deployi...Programming Posted on 2025-04-06
-
How to Check if an Object Has a Specific Attribute in Python?Method to Determine Object Attribute ExistenceThis inquiry seeks a method to verify the presence of a specific attribute within an object. Consider th...Programming Posted on 2025-04-06
-
How to upload files with additional parameters using java.net.URLConnection and multipart/form-data encoding?Uploading Files with HTTP RequestsTo upload files to an HTTP server while also submitting additional parameters, java.net.URLConnection and multipart/...Programming Posted on 2025-04-06
-
How to Create a Smooth Left-Right CSS Animation for a Div Within Its Container?Generic CSS Animation for Left-Right MovementIn this article, we'll explore creating a generic CSS animation to move a div left and right, reachin...Programming Posted on 2025-04-06
-
Why Am I Getting a "Could Not Find an Implementation of the Query Pattern" Error in My Silverlight LINQ Query?Query Pattern Implementation Absence: Resolving "Could Not Find" ErrorsIn a Silverlight application, an attempt to establish a database conn...Programming Posted on 2025-04-06















Study Chinese
- 1 How do you say "walk" in Chinese? 走路 Chinese pronunciation, 走路 Chinese learning
- 2 How do you say "take a plane" in Chinese? 坐飞机 Chinese pronunciation, 坐飞机 Chinese learning
- 3 How do you say "take a train" in Chinese? 坐火车 Chinese pronunciation, 坐火车 Chinese learning
- 4 How do you say "take a bus" in Chinese? 坐车 Chinese pronunciation, 坐车 Chinese learning
- 5 How to say drive in Chinese? 开车 Chinese pronunciation, 开车 Chinese learning
- 6 How do you say swimming in Chinese? 游泳 Chinese pronunciation, 游泳 Chinese learning
- 7 How do you say ride a bicycle in Chinese? 骑自行车 Chinese pronunciation, 骑自行车 Chinese learning
- 8 How do you say hello in Chinese? 你好Chinese pronunciation, 你好Chinese learning
- 9 How do you say thank you in Chinese? 谢谢Chinese pronunciation, 谢谢Chinese learning
- 10 How to say goodbye in Chinese? 再见Chinese pronunciation, 再见Chinese learning









